OnlineHelp: Stabilization Panel

Perhaps you start with this video: https://vimeo.com/25742413

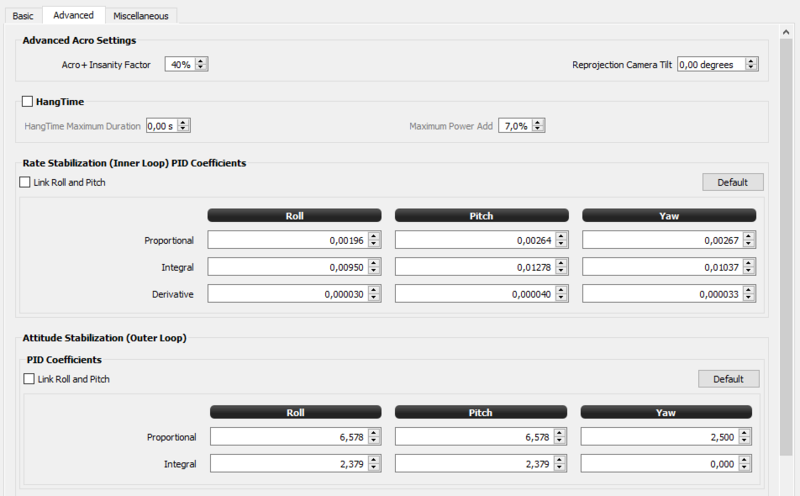
See Advanced for explanations. But remember, the values are show factor 1000 of advanced settings



- Proportional:
Slowly raise Kp until you start seeing clear oscillations when you fly. Then lower the value by 20% or so. - Integral:
As a rule of thumb, you can set the Ki at roughly the same value as the Kp. - Derivative

- Proportional:
Slowly raise Kp until you start seeing clear oscillations when you fly. Then lower the value by 20% or so.
You can usually go for higher values for Yaw factors. - Integral
- Derivative



- Kp: The moment-by-moment difference (called the "error") between the desired rotation rate or angle and the measured rotation rate or angle is multiplied by this value. (The "p" in Kp means "proportional," a concept from control theory.)
- Ki: The difference between the desired rotation rate or angle and the measured rotation rate or angle is multiplied by this value, just like Kp, but the value multiplied by Ki also takes into account how long the error has been present. If the error has been present longer, the value that Ki multiplies is greater. Taking into account how long an error has been present enables some "self tuning" of the aircraft. (The "i" in Ki stands for "integral," because the error value that is multiplied by Ki has been "integrated" over time.)
- Kd: Derivative of a function over time basically is it's change rate. It's the change in error that is being observed and multiplied with Kd to get an additional part of the correction signal. So if the error rises fast (e.g. due to fast stick movements or external disturbance like wind gusts), the D term provides some "extra kick" that makes the control output respond faster. On the other hand, it also acts as a dampening factor - if the error gets smaller over time (because the control loop does it's job), the change in error is negative and in this situation, the total output of the control loop is smaller than it would be with only P and I term alone. This also helps to reduce overshoots and allows for higher Kp settings as it would be possible without D term. The only drawback is that it's very sensitive to noise so the D term should be used carefully, especially on frames with a lot of vibrations. (The "d" in Kd stands for "derivative")
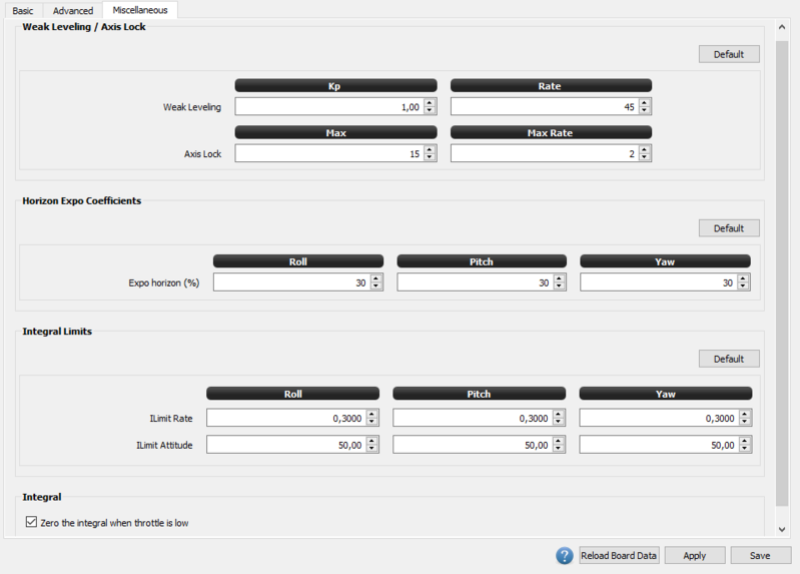
- ILimit sets the maximum value of the integral (that is, the maximum value of error accumulated over time) used by Ki.
The stabilization coefficients: Kp, Ki, and ILimit work the same way in both the Rate (outer) loop and the Attitude (inner) loop. However, as was mentioned earlier in the Control Structure section:
Kd is used only in Rate mode, not Attitude mode.
- The Rate coefficients multiply the difference between the desired and the measured rotation rate, but the Attitude coefficients multiply the difference between the desired and measure rotation angle.
- A Rate Stabilization Ki value is typically not set if that axis is set to Attitude mode. Instead, the Attitude Stabilization Ki value in the outer loop is used.
If you make these settings too high, your aircraft can get twitchy or even develop oscillations. If you make the settings too low, your aircraft will respond weakly to inputs and may be unstable. When you are setting the stabilization coefficients, a good approach is to start with conservative values (such as the default values) and then gradually increase them (being mindful that they can interact) to the highest levels that don't induce oscillations.
When you are tuning the stabilization coefficients in the previous section, you typically want to set them as high as possible without inducing oscillation. Then you control how aggressively your aircraft flies by setting Stick and Range Limits.
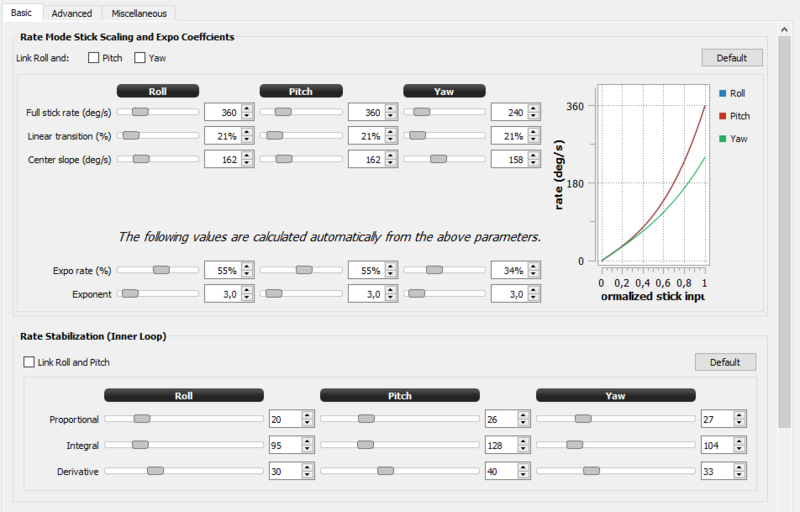
Full Stick Angle (deg): This setting controls how many degrees of movement a full-stick movement commands in Attitude mode only.
The default value is 55/55/35 degrees on the latest firmware. You can increase this value for more aggressive flying.
This setting has no effect in the other stabilization modes (Rate, Weak Leveling, and AxisLock, AcroDyne, Acro+).
Full Stick Rate (deg/s): This setting controls how many degrees per second a full-stick movement commands in all modes except Attitude.
The default value is 150 degrees per second, but a higher value may be required for flips.
This setting has no effect in the Attitude mode.
Maximum rate in attitude mode (deg/s): This sets the maximum rotation rate on an axis. For example, if you move the stick from one extreme to the other, this setting limits how fast the movement on that axis occurs. This term should not normally require changing, but may be useful for limiting rapid movement of aerial photography ships,or for increasing stick sensitivity in attitude mode on aircraft which utilize low PID values.