GPS Fix estimation (dead reconing, RTH without GPS fix) for fixed wing #8347
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,93 @@ | ||
| # GPS Fix estimation (dead reconing, RTH without GPS) for fixed wing | ||
|
|
||
| Video demonstration | ||
|
|
||
| [](https://www.youtube.com/watch?v=wzvgRpXCS4U) | ||
|
|
||
| There is possibility to allow plane to estimate it's position when GPS fix is lost. | ||
| The main purpose is RTH without GPS. | ||
| It works for fixed wing only. | ||
|
|
||
| Plane should have the following sensors: | ||
| - acceleromenter, gyroscope | ||
| - barometer | ||
| - GPS | ||
| - magnethometer | ||
| - pitot (optional) | ||
|
|
||
| By befault, all navigation modes are disabled when GPS fix is lost. If RC signal is lost also, plane will not be able to enable RTH. Plane will switch to LANDING instead. When flying above inreachable spaces, plane will be lost. | ||
|
|
||
| GPS fix estimation allows to recover plane using magnetometer and baromener only. | ||
|
|
||
| Note, that GPS fix estimation is not a solution for navigation without GPS. Without GPS fix, position error accumulates quickly. But it is acceptable for RTH. | ||
|
|
||
| # How it works ? | ||
|
|
||
| In normal situation, plane is receiving it's position from GPS sensor. This way it is able to hold course, RTH or navigate by waypoints. | ||
|
|
||
|
|
||
| Without GPS fix, plane has nose heading from magnetometer only. | ||
|
|
||
| To navigate without GPS fix, we make the following assumptions: | ||
| - plane is flying in the direction where nose is pointing | ||
| - (if pitot tube is not installed) plane is flying with constant airspeed, specified in settings | ||
|
|
||
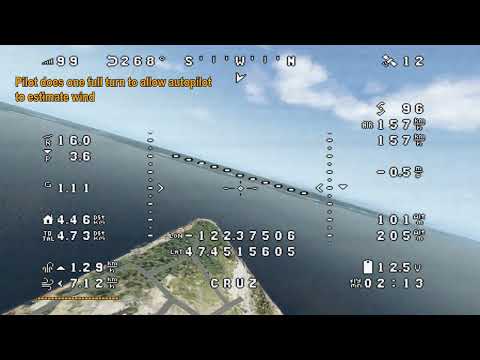
| It is posible to roughtly estimate position using theese assumptions. To increase accuracy, plane will use information about wind direction and speed, estimated before GPS fix was lost. To increase groundspeed estimation accuracy, plane will use pitot tube data(if available). | ||
|
|
||
| From estimated heading direction and speed, plane is able to **roughtly** estimate it's position. | ||
|
|
||
| It is assumed, that plane will fly in roughtly estimated direction to home position untill either GPS fix or RC signal is recovered. | ||
|
|
||
| *Plane has to aquire GPS fix and store home position before takeoff. Estimation completely without GPS fix will not work*. | ||
|
|
||
| # Settings | ||
|
|
||
| GPS Fix estimation is enabled with CLI command: | ||
|
|
||
| ```set inav_allow_gps_fix_estimation=ON``` | ||
|
|
||
| Also you have to specify criuse airspeed of the plane. | ||
|
|
||
| To find out cruise airspeed, make a test flight. Enable ground speed display on OSD. Flight in CRUISE mode in two opposite directions. Take average speed. | ||
|
|
||
| Cruise airspeed is specified in cm/s. | ||
|
|
||
| To convert km/h to m/s, multiply by 27.77. | ||
|
|
||
|
|
||
| Example: 100 km/h = 100 * 27.77 = 2777 cm/s | ||
|
|
||
| ```set fw_reference_airspeed=2777``` | ||
|
|
||
| *It is important, that plane fly with specified speed in CRUISE mode. If you have set option "Increase cruise speed with throttle" - do not use it without GPS Fix.* | ||
|
|
||
| *If pitot is available, pitot sensor data will be used instead of constant.* | ||
|
|
||
| *Note related command: to continue mission without RC signal, see command ```set failsafe_mission=OFF```.* | ||
|
|
||
| **After entering CLI command, make sure that settings are saved:** | ||
|
|
||
| ```save``` | ||
|
|
||
| # Disabling GPS sensor from RC controller | ||
|
|
||
|  | ||
|
|
||
| For testing purpoces, it is possible to disable GPS sensor fix from RC controller in programming tab: | ||
|
|
||
| *GPS can be disabled only after 1) initial GPS fix is acquired 2) in ARMED mode.* | ||
|
|
||
| # Allowing wp missions with GPS Fix estimation | ||
|
|
||
| ```failsafe_gps_fix_estimation_delay``` | ||
|
|
||
| Controls whether waypoint mission is allowed to proceed with gps fix estimation. Sets the time delay in seconds between gps fix lost event and RTH activation. Minimum delay is 7 seconds. If set to -1 the mission will continue until the end. With default setting(7), waypoint mission is aborted and switched to RTH with 7 seconds delay. RTH is done with GPS Fix estimation. | ||
|
|
||
| # Is it possible to implement this for multirotor ? | ||
|
|
||
| There are some ideas, but there is no solution now. We can not make assumptions with multirotor which we can make with a fixed wing. | ||
|
|
||
|
|
||
| # Links | ||
|
|
||
| INAV HITL https://github.com/RomanLut/INAV-X-Plane-HITL |
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Oops, something went wrong.
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
Tabbed indentation ? https://github.com/iNavFlight/inav/blob/master/docs/development/Development.md
Thought the checking system complained about this ?