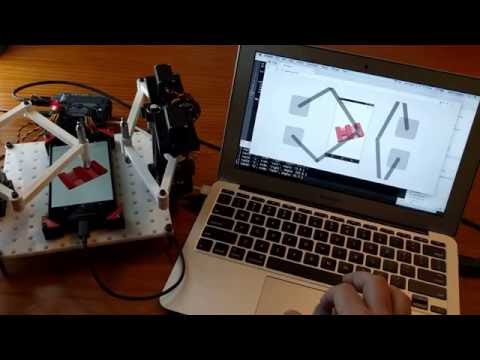
Web-based controller for the Tapster Sidekick robot
- install the required Node modules:
npm install
- Download all git submodules. We include minicap as a Git submodule. And minicap includes libjpeg-turbo.
git submodule update --init --recursive
- Build minicap. This requires compiling with the Android NDK:
cd minicap
ndk-build
cd ..
(You should now see the required Android binaries available in ./libs.)
- Install minicap's Node modules:
cd minicap/example
npm install
cd ../..
(Make sure you have connected an Android device via USB and that USB debugging is enabled on the device.)
- Run server.js from the main checkout directory:
node server.js
- Open the controller URL:
http://localhost:8080/

Q: How do I tap the screen? Where's the tap/click command?!
A: There's currently no gesture in the controller web interface for controlling the z-height of Sidekick's arms. For the moment, here's how you can move each arm up and down.
When you launch server.js, it also launches a REPL prompt. The left arm's z-axis servo is mapped to the object "s3" (for servo #3), and the right arm's z-axis servo is mapped to "s6" (for servo #6).
To raise arm to a safety height:
('100' is the height, '1000' is the number of milliseconds the servo will take to complete the move.)
>> // Left z-axis
>> s3.to(100,1000)
>> // Right z-axis
>> s6.to(100,1000)
To move arm to screen surface:
(Note: you might have to change '70' a little, depending on how your Sidekick robot was assembled.)
>> // Left z-axis
>> s3.to(70,1000)
>> // Right z-axis
>> s6.to(70,1000)
To lower arm to side of phone to hit device power and volume buttons:
(Note: You should move the stylus away from the phone screen's surface beforehand.)
>> // Left z-axis
>> s3.to(20,1000)
>> // Right z-axis
>> s6.to(20,1000)