-
Notifications
You must be signed in to change notification settings - Fork 8
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
3 changed files
with
232 additions
and
124 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,230 @@ | ||
| # crane_plus_examples_py | ||
|
|
||
| このパッケージはCRANE+ V2 ROS 2パッケージのPythonによるサンプルコード集です。 | ||
|
|
||
| ## 準備(実機を使う場合) | ||
|
|
||
|  | ||
|
|
||
| ### 1. CRANE+ V2本体をPCに接続する | ||
|
|
||
| CRANE+ V2本体をPCに接続します。 | ||
| 接続方法は製品マニュアルを参照してください。 | ||
|
|
||
| **※CRANE+ V2本体が接触しないように、十分なスペースを確保してください。** | ||
|
|
||
| ### 2. USB通信ポートの接続を確認する | ||
|
|
||
| USB通信ポートの設定については`crane_plus_control`の | ||
| [README](../crane_plus_control/README.md) | ||
| を参照してください。 | ||
|
|
||
| **正しく設定できていない場合、CRANE+ V2が動作しない、振動する、などの不安定な動きになるので注意してください** | ||
|
|
||
| ### 3. move_groupとcontrollerを起動する | ||
|
|
||
| #### 標準のCRANE+ V2を使用する場合 | ||
|
|
||
| 次のコマンドでmove_group (`crane_plus_moveit_config`)と | ||
| controller (`crane_plus_control`)を起動します。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples demo.launch.py port_name:=/dev/ttyUSB0 | ||
| ``` | ||
|
|
||
| #### Webカメラ搭載モデルを使用する場合 | ||
|
|
||
| Webカメラ搭載モデルの場合は、次のコマンドを実行してください。 | ||
| ```video_device```は使用するWebカメラを指定してください。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples demo.launch.py port_name:=/dev/ttyUSB0 use_camera:=true video_device:=/dev/video0 | ||
| ``` | ||
|
|
||
| ## 準備(Gazeboを使う場合) | ||
| ======= | ||
| 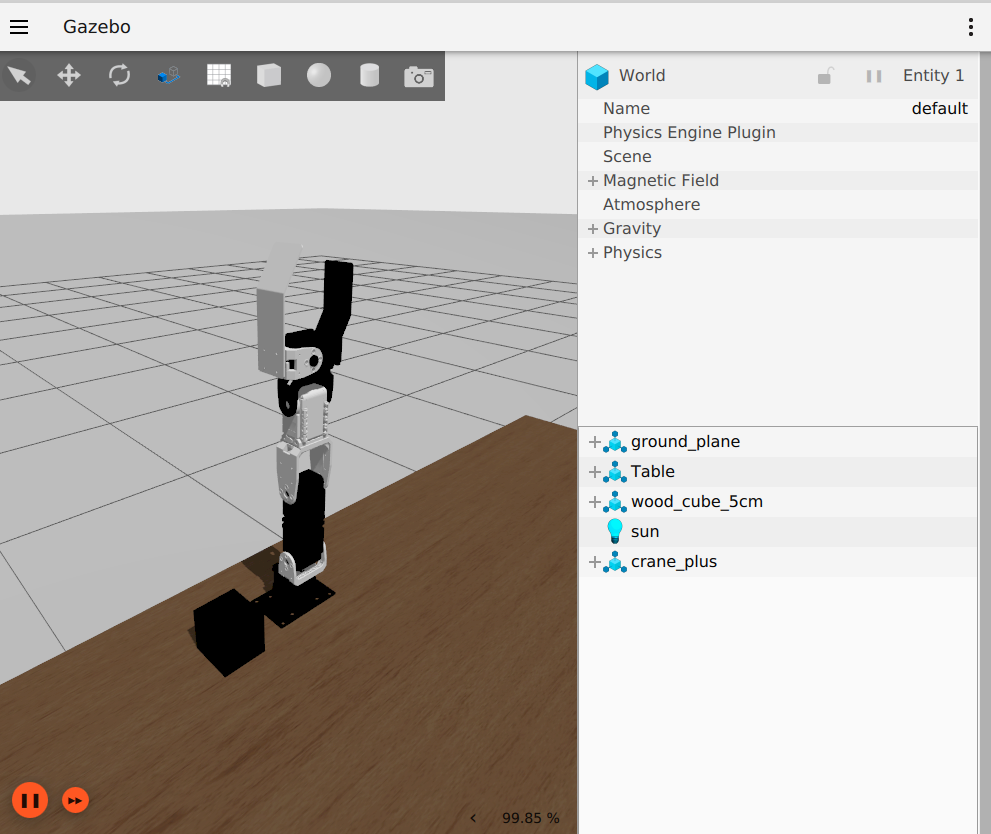 | ||
|
|
||
| ### 1. move_groupとGazeboを起動する | ||
|
|
||
| 次のコマンドでmove_group (`crane_plus_moveit_config`)とGazeboを起動します。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_gazebo crane_plus_with_table.launch.py | ||
| ``` | ||
|
|
||
| ## Pythonのサンプルプログラムを実行する | ||
|
|
||
| 準備ができたらPythonによるサンプルプログラムを実行します。 | ||
| 例えばグリッパを開閉するサンプルは次のコマンドで実行できます。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py example.launch.py example:='gripper_control' | ||
| ``` | ||
|
|
||
| 終了するときは`Ctrl+c`を入力します。 | ||
|
|
||
| ## Gazeboでサンプルプログラムを実行する場合 | ||
|
|
||
| Gazeboでサンプルプログラムを実行する場合は`use_sim_time`オプションを付けます。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py example.launch.py example:='gripper_control' use_sim_time:=true | ||
| ``` | ||
|
|
||
| ## Examples | ||
|
|
||
| `demo.launch.py`を実行している状態で各サンプルを実行できます。 | ||
|
|
||
| - [gripper_control](#gripper_control) | ||
| - [pose_groupstate](#pose_groupstate) | ||
| - [joint_values](#joint_values) | ||
| - [pick_and_place](#pick_and_place) | ||
|
|
||
| 実行できるサンプルの一覧は、`examples.launch.py`にオプション`-s`を付けて実行することで表示できます。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py example.launch.py -s | ||
| Arguments (pass arguments as '<name>:=<value>'): | ||
|
|
||
| 'example': | ||
| Set an example executable name: [gripper_control, pose_groupstate, joint_values, pick_and_place] | ||
| (default: 'gripper_control') | ||
| ``` | ||
|
|
||
| --- | ||
|
|
||
| ### gripper_control | ||
|
|
||
| グリッパを開閉させるコード例です。 | ||
|
|
||
| 次のコマンドを実行します。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py example.launch.py example:='gripper_control' | ||
| ``` | ||
|
|
||
| <img src=https://rt-net.github.io/images/crane-plus/gripper_control.gif width=500px /> | ||
|
|
||
| [back to example list](#examples) | ||
|
|
||
| --- | ||
|
|
||
| ### pose_groupstate | ||
|
|
||
| group_stateを使うコード例です。 | ||
|
|
||
| SRDFファイル[crane_plus_moveit_config/config/crane_plus.srdf](../crane_plus_moveit_config/config/crane_plus.srdf) | ||
| に記載されている`home`と`vertical`の姿勢に移行します。 | ||
|
|
||
| 次のコマンドを実行します。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py example.launch.py example:='pose_groupstate' | ||
| ``` | ||
|
|
||
| <img src=https://rt-net.github.io/images/crane-plus/pose_groupstate.gif width=500px /> | ||
|
|
||
| [back to example list](#examples) | ||
|
|
||
| --- | ||
|
|
||
| ### joint_values | ||
|
|
||
| アームのジョイント角度を1つずつ変更するコード例です。 | ||
|
|
||
| 次のコマンドを実行します。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py example.launch.py example:='joint_values' | ||
| ``` | ||
|
|
||
| <img src=https://rt-net.github.io/images/crane-plus/joint_values.gif width=500px /> | ||
|
|
||
| [back to example list](#examples) | ||
|
|
||
| --- | ||
|
|
||
| ### pick_and_place | ||
|
|
||
| モノを掴む・持ち上げる・運ぶ・置くコード例です。 | ||
|
|
||
| 次のコマンドを実行します。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py example.launch.py example:='pick_and_place' | ||
| ``` | ||
|
|
||
| <img src=https://rt-net.github.io/images/crane-plus/pick_and_place.gif width=500px /> | ||
|
|
||
| [back to example list](#examples) | ||
|
|
||
| --- | ||
|
|
||
| ## Camera Examples | ||
|
|
||
| Webカメラ搭載モデルのカメラを使用したサンプルコードです。 | ||
|
|
||
| [「Webカメラ搭載モデルを使用する場合」](#Webカメラ搭載モデルを使用する場合)の手順に従って、 | ||
| `demo.launch`を実行している状態で、 | ||
| 各サンプルを実行できます。 | ||
|
|
||
| - [aruco\_detection](#aruco_detection) | ||
| - [color\_detection](#color_detection) | ||
|
|
||
| 実行できるサンプルの一覧は、`camera_example.launch.py`にオプション`-s`を付けて実行することで確認できます。 | ||
|
|
||
| ```sh | ||
| $ ros2 launch crane_plus_examples_py camera_example.launch.py -s | ||
| Arguments (pass arguments as '<name>:=<value>'): | ||
|
|
||
| 'example': | ||
| Set an example executable name: [color_detection] | ||
| (default: 'color_detection') | ||
| ``` | ||
|
|
||
| --- | ||
|
|
||
| ### aruco_detection | ||
|
|
||
| モノに取り付けたArUcoマーカをカメラで検出し、マーカ位置に合わせて掴むコード例です。 | ||
| マーカは[aruco_markers.pdf](./aruco_markers.pdf)をA4紙に印刷して、一辺50mmの立方体に取り付けて使用します。 | ||
|
|
||
| 検出されたマーカの位置姿勢はtfのフレームとして配信されます。 | ||
| tfの`frame_id`はマーカIDごとに異なりID0のマーカの`frame_id`は`target_0`になります。 | ||
| 掴む対象は`target_0`に設定されています。 | ||
| マーカ検出には[OpenCV](https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html)を使用しています。 | ||
|
|
||
| 次のコマンドを実行します。 | ||
|
|
||
| ```bash | ||
| ros2 launch crane_plus_examples_py camera_example.launch.py example:='aruco_detection' | ||
| ``` | ||
|
|
||
| #### Videos | ||
| [](https://youtu.be/m9dus6LCocc) | ||
|
|
||
| [back to example list](#examples) | ||
|
|
||
| --- | ||
|
|
||
| ### color_detection | ||
|
|
||
| 特定の色の物体を検出して掴むコード例です。 | ||
|
|
||
| デフォルトでは赤い物体の位置をtfのフレームとして配信します。 | ||
| tfの`frame_id`は`target_0`です。 | ||
| 色検出には[OpenCV](https://docs.opencv.org/4.x/db/d8e/tutorial_threshold.html)を使用しています。 | ||
|
|
||
| 次のコマンドを実行します。 | ||
|
|
||
| ```sh | ||
| ros2 launch crane_plus_examples_py camera_example.launch.py example:='color_detection' | ||
| ``` | ||
|
|
||
| #### Videos | ||
| [](https://youtu.be/Kn0eWA7sALY) | ||
|
|
||
| [back to example list](#examples) | ||
|
|
||
| --- |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters