Frame transformations different from Ouster Software Manual #84
Comments
|
I think the rotation part is actually correct, in the software manual they define three frames: sensor, lidar, and IMU. I imagine these correspond to the That being said, there is an error in the translation portion of the transformations as the sensors each carry a certain vertial offset between frames. This is illustrated here |


|
@mnissov You are right. The rotation part is correct but relatively. I realized by visualizing the data in Rviz2 that the laser_data_frame is 180 degrees to the lidar frame in the software manual but the translation between them is 0, 0 , 0. In software manual the x axis of the lidar frame points to the backwards towards the external connector but in this driver it points to the front(as shown in the hand drawn image by me above). Then other frames relative to the laser_data_frame would be correct. |
|
I see what you mean, following the naming in the parameter yaml file of If I set the I suppose the quickest solution is just to rotate the Are we misunderstanding something or is this actually an error? @SteveMacenski Edit: I've just checked the same setup with the ros1 package from So it would seem as though there is something missing? This was done in rviz using the |
|
@mnissov Yes this is what I did in my application. I rotated the laser_sensor_frame by 180 degrees. But then we have to offset the laser_sensor_frame by +36.18 mm as the laser_sensor_frame and laser_data_frame are at the same translational position (in this ROS2 Ouster driver). This is because the LaserScan messages in the /scan topic are the 0 degrees beam elevation angle of the lidar and they are in the laser_data_frame which cannot be at the same height of laser_sensor_frame as the laser_sensor_frame is at the base of the lidar sensor. |
Hopefully this could be integrated into the package though, as far as I can see the package reads this metadata, the transformations, from the sensor so I can't quite see why it shouldn't be correct. Given that the same sensor works fine w/ the ros1 package which presumably does the same. Edit: Did you rotate by adding a static transform broadcaster? |
|
Actually I had to give the transformation from the base_link of the robot to the laser_sensor frame.There it self I rotated the laser_sensor frame by 180 degrees and added the offset of +36.18 mm. So that I am giving as a static transform in my URDF. I also then used Google Cartographer to make the 3D SLAM with 3D lidar, IMU and odometry and the results were very well. When I did not rotate the laser_sensor_frame by 180 degrees my SLAM results were horrible. |
|
Maybe it's a problem with how the transformation is applied, looking at the
|

|
I'm coincidentally facing the same problem, and the main issue is that the translation values between the sensor and laser/imu frames are omitted in ROS2 drivers (as it can be seen from your screenshot too) |
|
I have tracked the problem to I believe the lines should be changed as the following:
@SteveMacenski do you agree? |

|
@goksanisil23 this fixes the translation, however I still believe the rotation has something strange I've placed a chair next to the connector side of the lidar, this means in Doing so and monitoring using the sensor frame and lidar frame as baselink shows that it is in fact the opposite, so I think there should still be a mismatch somewhere.
Edit: echoing the |


|
For reference, it looks like there is a bug in this driver where the driver stamps pointclouds with the |
|
@goksanisil23 thanks a lot for the fix! |
Hello
I just checked that the frame transformations on the tf_static topic are different from the transformations given in the Ouster Software Manual. This is the output if the /tf_static topic which is published just once when we start this driver -
transforms:
stamp:
sec: 1632922020
nanosec: 663394972
frame_id: laser_sensor_frame
child_frame_id: imu_data_frame
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
stamp:
sec: 1632922020
nanosec: 663400150
frame_id: laser_sensor_frame
child_frame_id: laser_data_frame
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 1.0
w: 0.0
When I visualized the data in RViz I saw that the laser_sensor frame is rotated by 180 degrees from the RViz axes. The laser_data_frame in RViz with respect to the real Ouster 0S1-128 Sensor was like this -
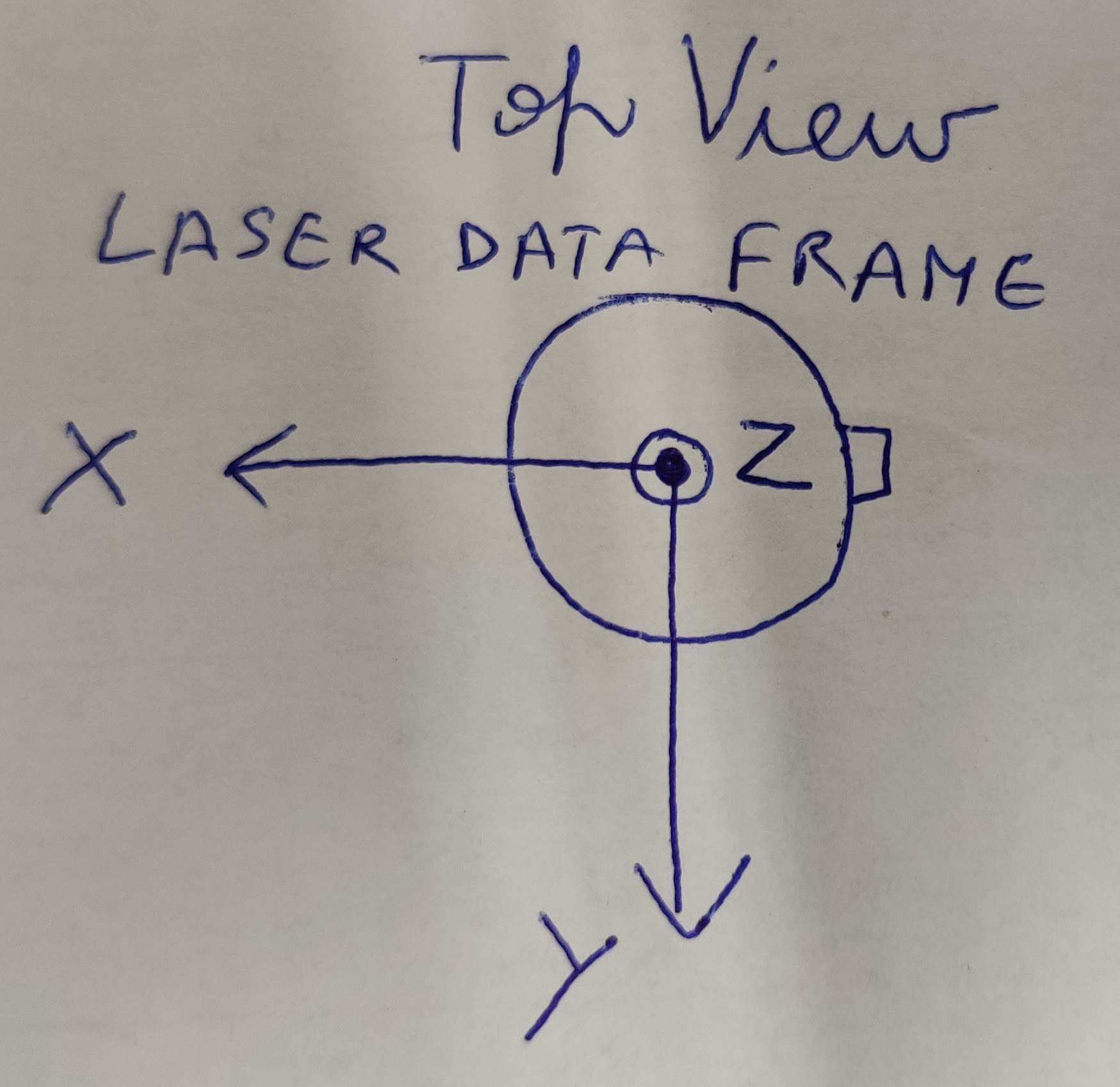
Which is completely different from the frame transformations given in the manual. So I want to know the correct transformations of the laser_data_frame and imu_data_frame with respect to the laser_sensor_frame and also the correct position and orientation of the laser_sensor_frame with respect to the real Ouster Sensor.
Thanks.
Best regards
Gaurav
The text was updated successfully, but these errors were encountered: