This is a controller for a vacuum pump, useful in pick-and-place machines. The controller adjusts the rpm of a vacuum pump to maintain a constant vacuum. The controller can be used over usb, as part of a pick-and-place machine, or standalone, with a footswitch.
-
PID controller with autotuning
-
controls one 12V 1A vacuum pump (diaphragm pump).
-
up to 4 x BMP280 pressure sensors: 1 for outside pressure, 1 for vacuum pressure, and 2 for two pick-and-place nozzles. The pressure sensors on the nozzles are used to check whether a component has been picked up or fallen off.
-
sensor pressure range 300 to 1100 hPa
-
up to 2 x 12V solenoid valves, for up to two pick-and-place nozzles.
The controller needs two power sources: +5V from the usb connector for the electronics, and +12V from the DC jack for the vacuum pump and solenoid valves.
Plug the controller in a usb port, and connect to the usb serial port. On linux, this is minicom -D /dev/ttyACM0
Hit the reset button to see the boot message:
vacuum controller - type h for help
sensors ok ok - -
ready
>
The sensors line indicates sensor status:
oksensor detected and running-no sensor detected?bmp280 unresponsive, or sensor is wrong type (not bmp280)
Every command is briefly described.
h help prints a command summary:
>h
commands, ## = int, #.## = float:
? print status
s#.## setpoint
p#.## proportional gain
i#.## integral gain
d#.## derivative gain
o#.## manual mode
a autotune
l## logging on/off
m## m-code
v## valve on/off
w write settings
r reset
f firmware
h help
>
All commands are a single character, optionally followed by a number, and terminated with enter.
>?
vacuum hPa: 99.97 motor: 73.60% mode: auto
setpoint hPa: 100.00 Kp: 150.00 Ki: 50.00 Kd: 0.00 logging: 0
pressure hPa: 938.86 838.89 939.41 0.00
sensors ok ok ok -
In this example, the boot message shows there are three sensors. The first sensor measures atmospheric pressure; the second sensor measures the pressure in the vacuum vat; the third measures the pressure at the nozzle. In this example the fourth sensor is absent (-).
The vacuum is the difference between the first and the second sensor. All pressures are in hPa. Atmospheric pressure is around 1000 hPa.
vacuum is the PID controller measured value. motor is PWM, in percent. mode is auto when the PID controller sets motor PWM. mode is manual if motor PWM has been set using the o command.
The vacuum pump controller is a PID controller. setpoint is the desired value; Kp, Ki and Kd are controller proportional, integral and derivative gain. It is normal for Kd to be zero. If logging is non-zero, pressure is logged on the console every 0.1s.
pressure is the pressure from the four sensors, in hPa. If a sensor is not plugged in, the pressure is 0.
sensors is the sensor state. If a sensor says ?, check the cable, check the sensor is plugged in right, or try power cycling.
The setpoint command sets the desired vacuum, in hPa.
>s100.0
ok
Sets the PID controller Kp.
>p150.0
ok
Sets the PID controller Ki.
>i50.0
ok
Sets the PID controller Kd. Usually zero.
>d0
ok
Switches logging on or off.
l0logging off.l1logging on.
Use the w command if you want this and other settings to be saved.
When logging is on, every sample is printed on the console output, in one line, e.g.:
;1743075;52417;93876;83764;93926;0;2067058
The fields are:
- time since boot in milliseconds
- motor PWM; a value from 0 to 65535.
- pressure of sensor 1, 2, 3, 4 in Pa.
- a checksum that is the 32 bit sum of the 6 previous numbers.
Logging output can be imported in a spreadsheet as csv. The line begins with a semi-colon ";", and numbers are separated by a semi-colon. If you parse console output, check for lines that begin with a semi-colon.
Switches outputs BO1 and BO2 on/off. These outputs are normally connected to solenoid valves.
v00switch BO1 offv01switch BO1 onv10switch BO2 offv11switch BO2 on
Restriction: Because of the way the driver ic works, both solenoid valves can not be powered at the same time. Switching one solenoid valve on automatically switches off the other.
Sets the motor PWM manually. Value is a number from 0 to 100, inclusive.
o100full speedo0stop. mnemonic: output zerooreturn to automatic mode
Autotune measures the step response. Values for Kp, Ki and Kd are calculated from the step response using lambda tuning. Running autotune optimizes controller response time, and the accuracy with which the vacuum is maintained.
>a
autotune - press c to cancel
cycle 1/5
0% 0 hPa
11% 1 hPa
100% 131 hPa
0% 0 hPa
100% 83 hPa
minpwm: 7141 maxpwm: 65535 minpressure: 0.49 maxpressure: 130.83
tau: 2.69s Kp: 149.34 Ki: 55.54
...
Kp: 149.60 Ki: 54.03 Kd: 0.00
enter w to save
After autotune, if the calculated settings seem correct, use w to store these settings in non-volatile memory. If you choose not to save, the old settings will be restored after the next reset or power cycle.
To adjust the controller to your system, you need to run autotune a and save the settings w at least once. Without autotune, controller response will be sluggish.
Run autotune again if firmware has been updated, vacuum pump or vacuum vessel has changed.
M-code commands consist of the letter M followed by a three-digit number. M-code commands are not echoed back when you type them, and no > prompt is printed when the command is finished. See the section on OpenPnP for details.
The w write command saves Kp, Ki, Kd, setpoint, and logging to non-volatile memory. The saved values will be restored on power-up.
>w
ok
The r reset command reboots the controller.
>r
vacuum controller - type h for help
sensors ok ok ok -
ready
>
The f command prints firmware version, system uptime, memory and cpu statistics:
>f
compiled Jun 1 2021
up 0:16
11240 bytes free
11 ms slowest loop
>
Use this to check for reboots, memory leaks, and cpu hogs.
Connect pressure sensors, vacuum pump, and solenoid valve.
Up to 4 BMP280 boards can be connected in headers H1..H4.
- H1: air pressure
- H2: pressure inside vacuum vessel
- H3: optional, pressure at nozzle 1
- H4: optional, pressure at nozzle 2
The minimal configuration is sensors at H1 and H2. BMP280 sensors measure pressures from 300 hPa to 1100 hPa.
There is no need to calibrate the sensors; the sensors are calibrated at the factory.
Connect a 12V DC brushless vacuum pump. Maximum current of the TB6612 driver is 1A continuous.
If the vacuum pump has two wires:
- red (+) to AO1
- black (-) to GND
The vacuum pump is limited to 12V 1A.
For 12V pumps that draw more than 1A, see pumps with PWM input
For the controller to work, if the voltage on pin AOUT1 increases, the vacuum pump should run faster, and the vacuum should increase.
Connect the first solenoid valve:
- red (+) to B01
- black (-) to GND
If there is a second solenoid valve, connect:
- red (+) to B02
- black (-) to GND

Sometimes a small, standalone tool is preferred. The optional footswitch can be used to switch the first solenoid valve on and off.
The footswitch connects using a 3.5mm TRRS jack. Solder a cable from an old mobile phone earset to an SPDT footswitch. Connections are:
- Tip: NO Normally open
- Ring1: NC Normally closed
- Ring2: unused
- Shield: Common
The console prints footswitch when a footswitch is detected.
In standalone mode connect the usb port to a mobile phone charger.

The display is a yellow/blue oled display, 128x64, SPI, SSD1306 controller. The display is optional; the controller also works without display. The display shows pump, sensors, and vacuum:
-
The bargraph at the top shows the pump motor. The larger the bar graph, the harder the motor works.
-
Next up to four rectangles, one for each sensor that is plugged in. If the rectangle is blue, the sensor is ok; if the rectangle is yellow there is a problem.
-
At the bottom the vacuum in hPa. The vacuum is the difference between the first and the second sensor.
To the right there is a small square that blinks slowly to show the display works.
On linux, configure udev. As root:
cat <<EOD > /etc/udev/rules.d/98-vacuum_pump.rules
ATTRS{idProduct}=="5740", ATTRS{idVendor}=="0483", ENV{ID_MODEL}=="vacuum_pump", MODE="664", GROUP="dialout", ENV{ID_MM_DEVICE_IGNORE}="1"
SUBSYSTEM=="tty", ACTION=="add", ENV{ID_MODEL}=="vacuum_pump", SYMLINK+="ttyACM99_vacuum_pump"
EOD
chmod 644 /etc/udev/rules.d/98-vacuum_pump.rules
udevadm control --reload-rules
This creates a device /dev/ttyACM99_vacuum_pump, open to everybody in the dialout group. Add yourself to the dialout group:
sudo adduser "$USER" dialout
Unplug and plug in the vacuum pump controller. Check dmesg shows a new usb device vacuum pump. Check minicom -D /dev/ttyACM99_vacuum_pump gives you the console prompt of the vacuum pump.
TBD - in progress
OpenPnP is software to run a machine that puts electronic components on a printed circuit board for soldering (pick-and-place machine). Typically, a pick-and-place machine uses vacuum to pick up small components. OpenPnP accesses the vacuum pump controller using the OpenPnP GCodeDriver.
OpenPnP uses M-code M115 to detect a controller.
The m-codes for vacuum have the structure M8 index action, with index:
- 0: ambient air (read only)
- 1: vacuum pump
- 2: nozzle1
- 3: nozzle2
and action:
- 0: switch off
- 1: switch on
- 2: read absolute pressure in hPa
- 3: read vacuum in hPa
The following m-codes are available for easy integration with openpnp:
| code | description |
|---|---|
| M115 | firmware version |
| M800 | no-op |
| M801 | no-op |
| M802 | read absolute air pressure |
| M803 | always reads 0 |
| M810 | switch pump off |
| M811 | switch pump on |
| M812 | read absolute pressure at pump |
| M813 | read vacuum at pump |
| M820 | switch nozzle 1 solenoid off |
| M821 | switch nozzle 1 solenoid on |
| M822 | read absolute pressure at nozzle1 |
| M823 | read vacuum at nozzle1 |
| M830 | switch nozzle 2 solenoid off |
| M831 | switch nozzle 2 solenoid on |
| M832 | read absolute pressure at nozzle2 |
| M833 | read vacuum at nozzle2 |
Example: Switch pump on.
m811
ok
Measure absolute air pressure and absolute pump pressure:
m802
[read:937]
ok
m812
[read:837]
ok
Vacuum is difference between air pressure and pump pressure:
m813
[read:100]
ok
Vacuum values can be negative due to small measurement errors, or if the sensor for measuring atmospheric pressure is missing.
In OpenPnP, configure a GCodeDriver VACUUM_PUMP for serial port /dev/ttyACM99_vacuum_pump.
| Setting | value |
|---|---|
| FIRMWARE_NAME | vacuum pump |
| COMMAND_CONFIRM_REGEX | ^ok$ |
| COMMAND_ERROR_REGEX | ^(what\?|how\?)$ |
| ACTUATE_BOOLEAN_COMMAND | M8{Index}{True:1}{False:0} |
| ACTUATOR_READ_COMMAND | M8{Index}3 |
| ACTUATOR_READ_REGEX | \[read:(?-?\d+)\] |
For head, nozzle 1 and nozzle 2, use three VACUUM_PUMP actuators with index:
| Actuator | Index |
|---|---|
| head | 1 |
| nozzle 1 | 2 |
| nozzle 2 | 3 |
See machine.xml

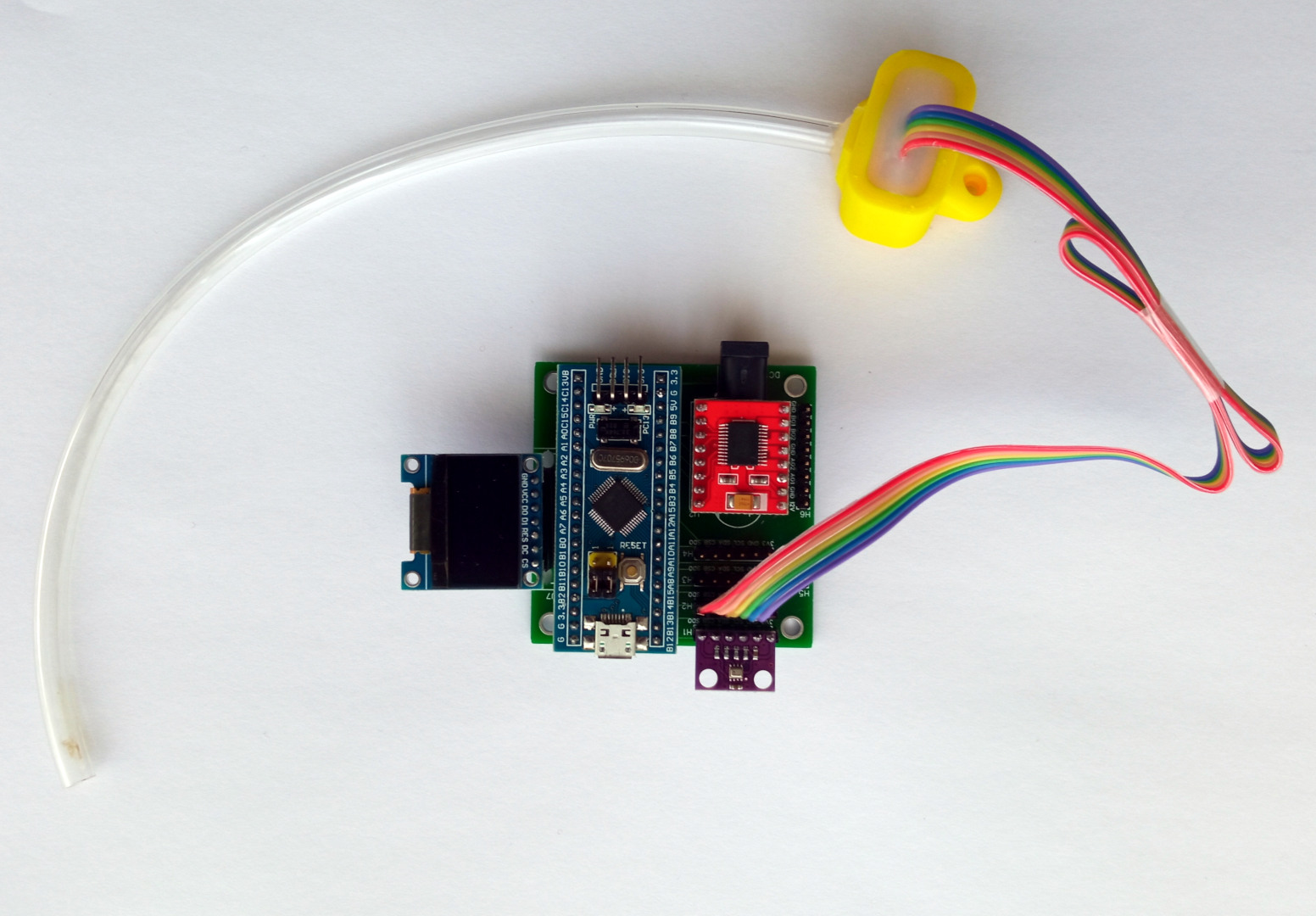
The board is built around an STM32F103 Blue Pill. The microcontroller reads the pressure from the BMP280 sensors, runs a PID controller algorithm, and sets PWM on a TB6612FNG driver to control the speed of the vacuum pump.
The board is 2 layer, 55 x 55 mm, hand-solderable.
Off-the-shelf parts:
| # | description |
|---|---|
| 1 | STM32F103xx controller board, 128kbyte flash. |
| 4 | BMP280 3.3V pressure sensor "GY-BMP280-3.3" |
| 1 | TB6612FNG dual motor driver |
| 1 | OLED 128x64, SPI, 7pin, SSD1306, yellow/blue |
| 1 | DC005 DC jack |
| 1 | PJ-320A 3.5 mm audio jack, 4 pin, through-hole |
| 1 | 47u/25V capacitor |
FDM 3D-printed parts:
- 3 x pressure sensor housing
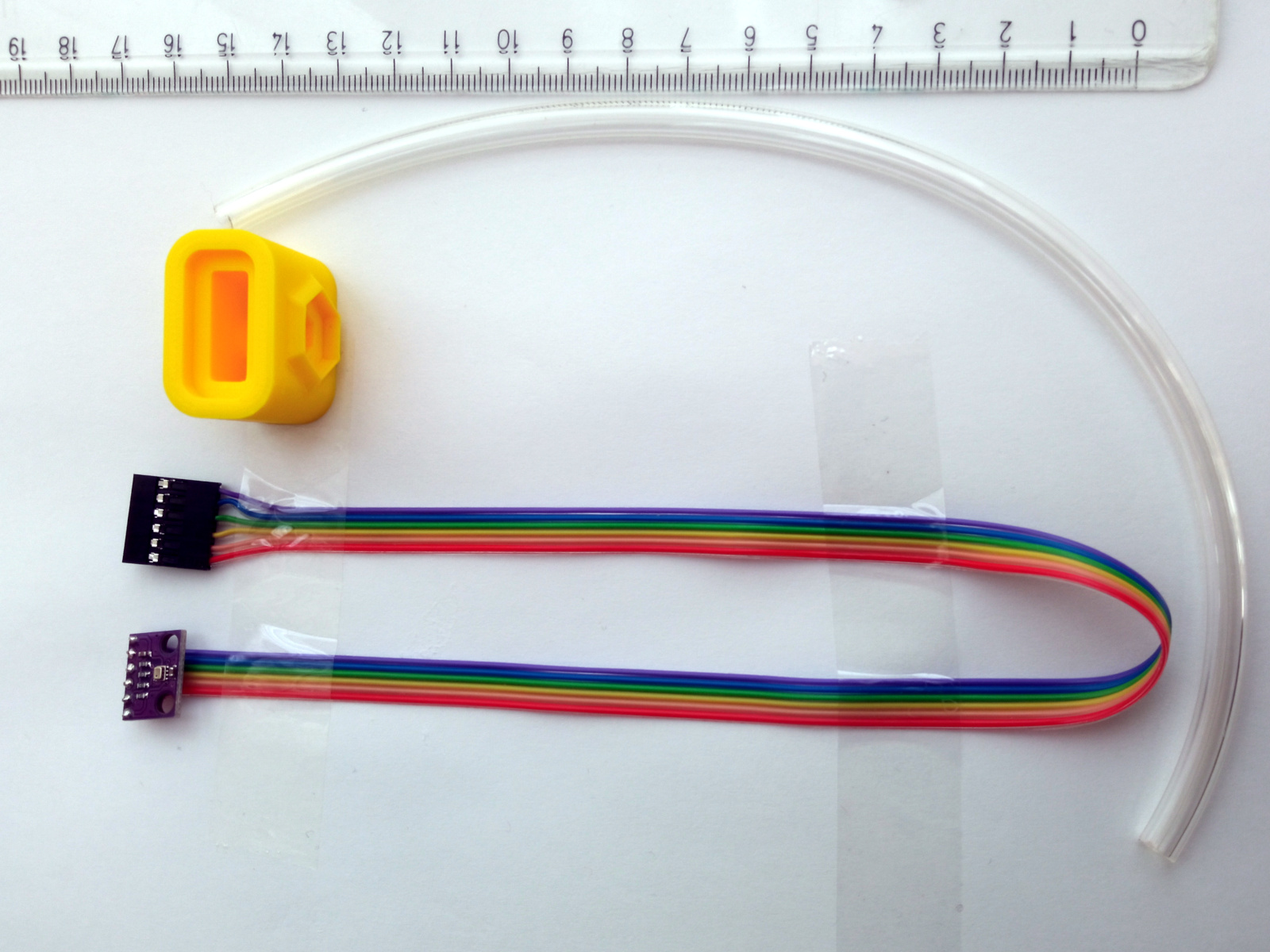
The pressure sensor consists of a GY-BMP280-3.3 module, sealed inside a 3d-printed housing.
The housing has been designed using OpenSCAD. OpenSCAD sources and STL files.
The tube is 6mm outside diameter, 4 mm inside diameter PU. Housing is sealed using silicone rubber. After applying the silicone rubber, wet your finger in liquid dishwasher detergent to gently push the silicone rubber into shape.
Test the sensor works before you seal the housing.
When looking at the GY-BMP280-3.3 pressure sensor module, the contacts are, from left to right: SDO, CSB, SDA, SCL, GND, VCC.
The software is an Arduino sketch, compiled with the STM32duino board support package. Sources are available on git. There's also a backup of the Arduino libraries used.
You can compile and upload the firmware from the Arduino IDE, or use the pre-compiled binaries and upload from the command line. To upload the firmware:
- connect a usb-serial converter to header H5, pins GND, TXD, RXD.
- set Blue Pill jumper BOOT0 to 1, BOOT1 to 0.
- reset or power cycle the Blue Pill
- upload the firmware.
- If using the Arduino IDE, choose Sketch->Upload.
- If uploading from the command line, use
/usr/bin/stm32flash -g 0x8000000 -b 115200 -w vacuumcontroller.ino.bin /dev/ttyUSB0, replacing USB0 with the device of the usb-serial converter.
- set Blue Pill jumper BOOT0 to 0, BOOT1 to 0.
- reset or power cycle the Blue Pill
With the firmware installed, led of the Blue Pill flashes briefly every 5 seconds. The console of the vacuum controller appears as a usb serial port, on linux typically /dev/ttyACM0. If an oled display is attached, the display lights up.
Download Gerbers for pcb manufacturing, stl files for 3d printing, and firmware for the microcontroller from releases. Pcb 's ordered at jlcpcb.com or oshpark.
If you like this, maybe you want to buy me a cup of tea:

This project was designed on a Raspberry Pi. The electronics pcb was designed using easyeda. The arduino sketch was compiled on Raspberry Pi with the Arduino IDE using the stm32duino package. The sensor housing was designed on Raspberry Pi using OpenSCAD with 3D glasses.