{kind=link}
A Walking Mechanism with Straight and Parallel Leg Motion
As part of an undergraduate kinematics course at BYU-Idaho in 2011, some fellow students and I built a prototype of the walking mechanism presented in Mehdigholi and Akbarnejad's paper "Optimization of Watt's Six-bar Linkage to Generate Straight and Parallel Leg Motion" (2008).
A diagram of the linkage was included in the paper, but the links were not drawn to scale. We optimized the linkage lengths in Mathematica using a brute-force approach.
Although our prototype was relatively crude, our YouTube videos on the project have reached over *46,000 views (collectively), and I recieve e-mails regularly requesting more details. I hope that uploading the files here will inspire others to create higher-quality physical prototypes of this interesting mechanism! (and free up my inbox at the same time :) )
- Original paper: The original paper by Mehdigholi and Akbarnejad describing the walking mechanism can be found here (open access):
- Watt 6-bar Walking Mechanism with Straight and Parallel.pdf: Class presentation on the project
- Mehdigholi_Watt_6_Bar_Diagram.png: Diagram of the walking mechanism. The dimensions can be scaled as needed for your project:
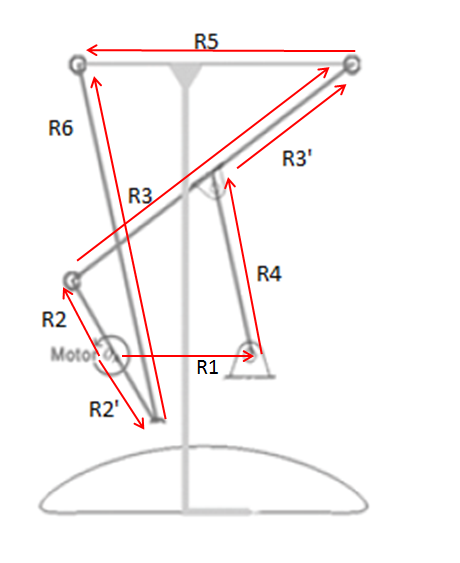
- R2 = 1.
- R2' = 1.
- R1 = 1.875
- R3 = 4.6875
- R3' = 2.3125
- R4 = 2.3125
- R5 = 3.8125
- R6 = 4.6875
- Mathematica: Mathematica notebook demonstrating an approach for modeling and optimizing the motion of the six-bar linkage. This is an old, uncommented notebook, and there is much room for improvement, but it may still be useful to you as an example of how to perform kinematic analysis of a linkage using a vector loop equation.
- YouTube:
- CAD Animation: https://www.youtube.com/watch?v=XnWlYM9TIwI
- Working Prototype: https://www.youtube.com/watch?v=2fwz9vatJR0
Please share your results if you build a prototype! -Ken
Group members: Thomas Checketts, John Payne, Mike Duke, and Kenny Aycock
Instructor: Greg Roach, Ph.D.; Additional guidance from David Johnson, Ph.D. on setting up the vector loop equation in Mathematica