{kind=link}
This repository is based on usbcnc grbl which in turn is based on native grbl 1.1f
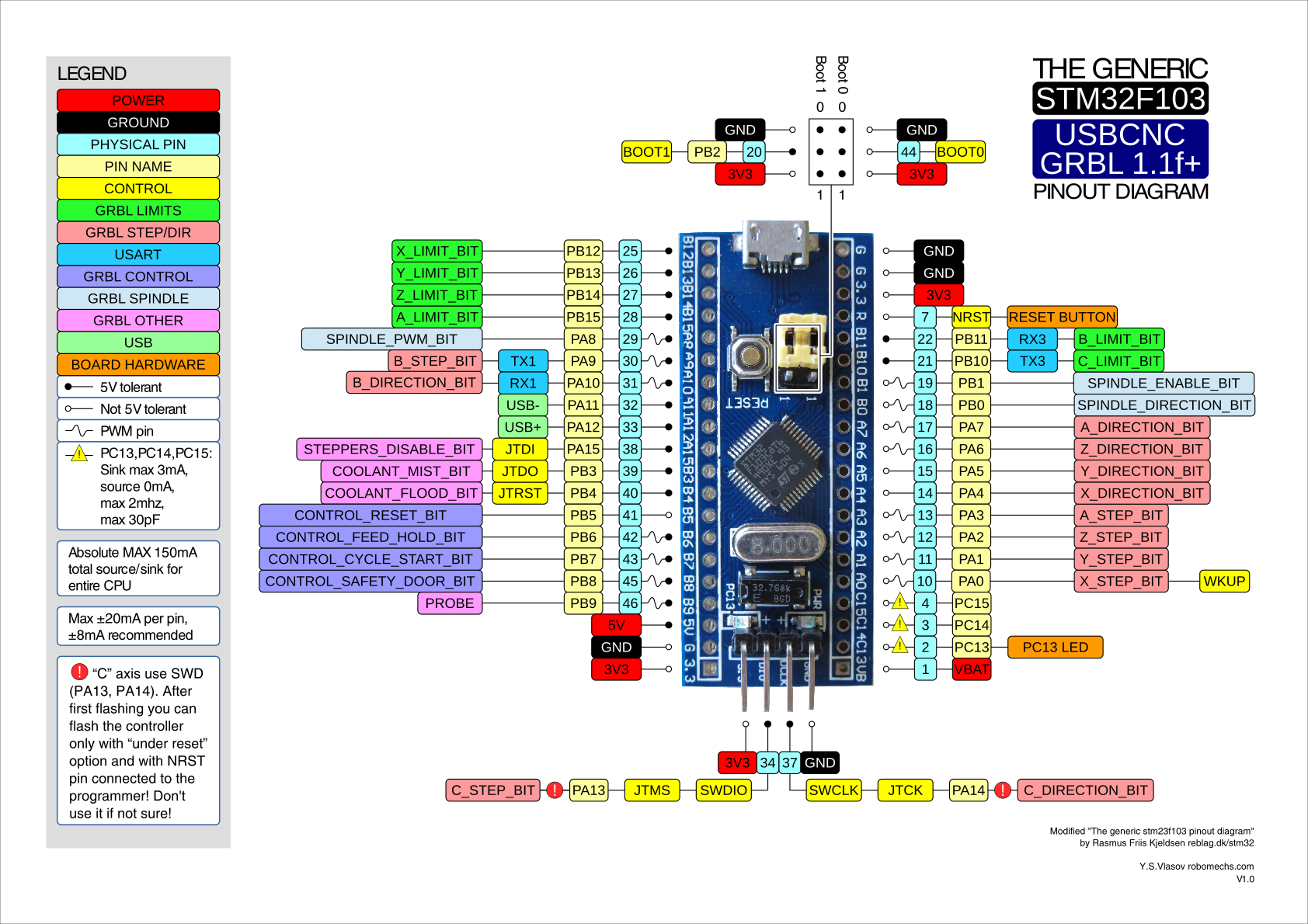
With 6-AXIS-USBCNC-GRBL you can use 3,4(default),5 or 6 axis depend on definition in config.h
Also there are some bugs (from usbcnc grbl) were fixed and some improvements were done.
Some of them:
- migrate from coIDE to Atollic truestudio
- 4,5,6th axis were added
- uint16_t probe_invert_mask
- issue#36 from usbcnc
- issue#38 from usbcnc
- issue#41 from usbcnc
- issue#46 from usbcnc
- issue#40 from usbcnc
- issue#49 from usbcnc
- NEW: STP_DRIVERS_ENABLE_DELAY
- issue#48 from usbcnc. STEP_PULSE_DELAY now works
- GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); // to enable PA15, PB3, PB4 pins
- NEW: USE_RESET_BTN_AS_ESTOP
- improved performance and stability in stepper.c issue#48 from usbcnc
- issue#60 from usbcnc
- issue#61 from usbcnc
Before homing "error:7" appears 2 times due to startup blocks are empty. It's ok. To eliminate this: set the startup blocks or comment definition in config.h
- Install Atollic truestudio
- add this project to Atollic
- (optional!) configure grbl with config.h (4 axis by default. You can't change it through the grbl interface) and default.h (you can change this settings later throught the grbl interface)
- (optional! do this if you did the previous step) compille it
- use st-link v2 or China clones for downloading firmware to bluepill
- configure grbl with "$x=val" commands (optional)
- use grbl controller with UGS, GcodeSender , OpenCNCPilot or other interfaces.
- You can also use UART (TX1, RX1) instead of USB to connect grbl controller via bluetooth and use with android app "Grbl Controller". Just #undef USEUSB in grbl.h after #ifdef STM32F103C8 or delete "USEUSB" in project properties -> C/C++ General -> Path and Symbols -> Symbols.
- If you want to use UART and more then 4 axis, you can map "B" axis Step and Dir outputs to PA11,12 instead of PA9,10 (see cpu-map.h).
- Don't map any pins if not sure. Some of them use microcontroller hardware features which aren't available on the other ones.