Home
The Wrapped Hypertime (WHyTe) is an enabling technology for long-term mobile robot autonomy in changing environments [1], but is applicable to problems outside the robotics domain. It allows to introduce the notion of dynamics into most spatial models used in the mobile robotics domain, improving ability of robots to cope with naturally-occuring environment changes. Hypertime is based on an assumption that from a mid- to long-term perspective, some of the environment dynamics are periodic. To reflect that, Hypertime models extend spatial models with a set of wrapped time dimensions that represent the periodicities of the observed variations. By performing clustering over this extended representation, the obtained model allows the prediction of probabilistic distributions of future states and events in both discrete and continuous spatial representations.
The idea builds on the success of the Frequency Map Enhancement (FreMEn), which also models periodic changes and was shown to improve efficiency of mobile robots as they learned the dynamics of their operational environments.
Let's say that you measured the number of people present in a certain area and you want to use the learned data to predict how many people will be present in the future. Hypertime takes the data points (a,t) observed over time (top, black) and processes them by frequency analysis~FreMEn to determine a dominant periodicity T. Then, it projects the time t onto a 2d space (called hypertime) and the vectors (a,t) become _(a, cos(2π t/T), sin(2π t/T))$ (bottom, left). The projected data are then clustered (bottom, center, blue) to estimate the distribution of a over the hypertime space (green). Projection of the distribution back to the uni-dimensional time domain allows to calculate the probabilistic distribution of a for any past or future time.

Let us explain using the same example again: Let's say that you measured the number of people present in a certain area. Let's say that every time ti you do the measurement, you obtain a number ai. After two days of measurements, you will get data that might look like the ones in Figure 1.
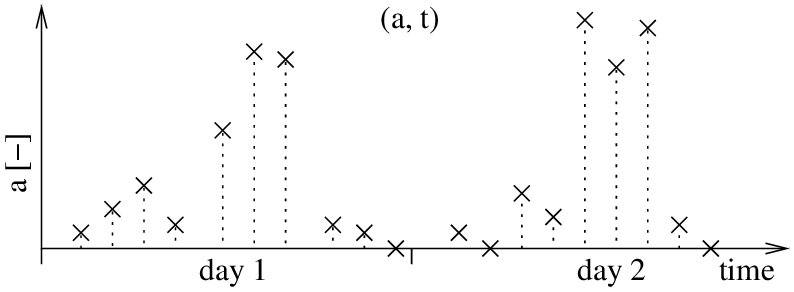
Now say that you want to predict the number of people for day 3 at 5pm. Ideally, you would like to have some model, that could tell you how likely it is to measure a given a at a given time t. In other words, you want to have a way to obtain a conditional probability density function p(a|t). The method presented here provides such a model by processing the data as follows:
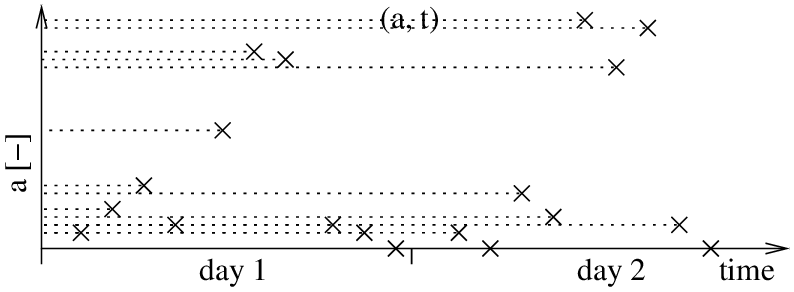
First, we store all measurements ai as 0xi. This means that we neglect the time domain for now and we only consider the values of a, which corresponds to the vertical axis of the graph, see Figure 2.
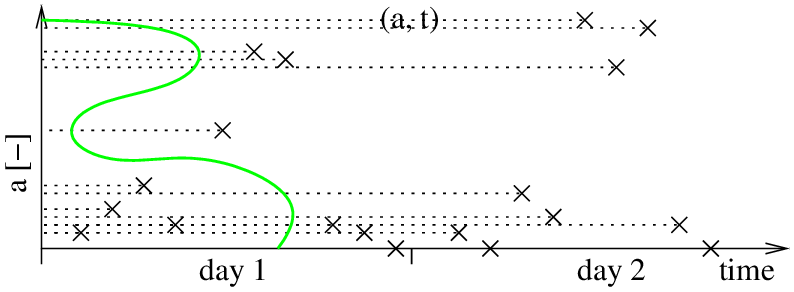
To obtain p(a), we run clustering over the 0xi. Let's say that we chose to use Gaussian mixtures with two clusters. We should get an estimate of the probabilistic distribution of a as displayed in green in Figure 3. After this step, we can estimate the probability of obtaining a given measurement a. Although we could estimate the probabilistic distribution of a analytically, a practical solution to estimate it is calculating p(a) over the domain of a in a numerical way.
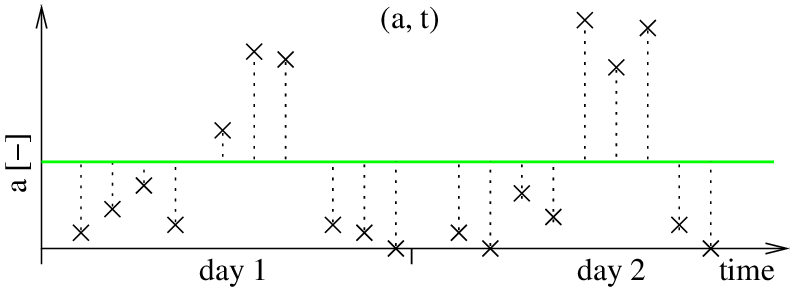
Using the model from the previous step, we predict the value of a'i for every time ti and we calculate an error _ei=_a'i-_ai. We sum the square of all the errors, obtaining the model error 0E. Since our model neglects time, the predicted values for all _ai will be identical and equal to the mean of the GMM model build in the previous step. The errors we get will look like this:
Now, we take the errors _ei and times _ii we check if they exhibit any periodical pattern. In practice, we use the FreMEn tool, based on the Fourier Transform to find if there is any periodicity. The Fourier Transform will tell us that the error exhibits a strong daily periodicity T1. This basically corresponds to finding the best sine wave to fit the errors.
Now, we take all values in 0xi and add the temporal information to them. This is done by extending each 0xi with two additional values sin( 2π ti /T1 ) and cos( 2π ti /T1 ), obtaining a vector 1xi = ( ai, sin( 2π ti /T1 ), cos( 2π ti /T1 ) ). This causes the original timeline of ai on Figure 1 to wrap around a unit circle, forming a cylinder as shown in Figure 3. In this space, measurements ai from the similar time of the day will get close to each other, and form natural clusters characterising the number of people around at a given time of the day. Once the points are projected, we start with the next iteration.
This time, we run clustering over the 1xi. Let's say that we chose to use Gaussian mixtures with three clusters, and we can obtain clusters as on Figure 4. This model allows us to calculate the joint probability p(a,t) be projecting it into the hypertime space, i.e. to ( a, sin( 2π t/T1), cos( 2π t/T1) ) and calculating the membership function of the projected point to the aforementioned clusters.
Knowledge of the p(a,t) allows to determine the most likely a for a given time t. Thus, we calculate the training set datapoints errors ei and overall model error 1E as during the first iteration.
Again, we use the FreMen to extract a dominant periodicity in the error ei, obtaining a second periodicity T1. However, the value of T2 is unlikely to reflect real periodicity in the data.
Again we extend every 1xi with two additional values sin( 2π ti /T2 ) and cos( 2π ti /T2 ), obtaining a set of vectors 2xi = ( ai, sin( 2π ti /T1 ), cos( 2π ti /T1 ), sin( 2π ti /T2 ), cos( 2π ti /T2 ) ). Then, we proceed with a next iteration.
This time, we run clustering over the 2xi obtaining a model capable to represent p(a,t) through projection of (a,t) into a 5D space from the previous step.
Knowledge of the p(a,t) allows to determine the most likely a for a given time t. Thus, we calculate the training set datapoint errors ei and overall model error 2E as during the first iteration. Since T2 is unlikely to represent a real periodicity, the model error 2E will be higher than the error 1E calculated during iteration 1. Thus, we will terminate the algorithm and use the model constructed during the clustering stage of iteration 1.
The model that we obtained calculates the joint probability p(a,t) by projecting _(a,t)) into ( a, sin( 2π t/T1), cos( 2π t/T1) ) and calculating its membership function to the clusters formed in the clustering step. However, prediction for a given time means that you want to calculate the conditional probability p(a|t). To do so, we first estimate the conditional probabilistic distribution p(a|t) over the domain of a. This is performed in a practical manner - we fix the time t, for which we want to perform a prediction and we choose the values of ac, which represent a's domain with sufficient granularity. Then, we project these values into the hypertime space, i.e. we form ( ac, sin( 2π t/T), cos( 2π t/T) ) and calculate _p(ac,t) = p( ac, sin( 2π t/T), cos( 2π t/T) ) for all values of ac. Then, we normalize the results so that the sum of p(ac,t) over all ac's is 1.
For details, please refer to the papers published so far:
-
T.Krajnik, T.Vintr, S.Molina, J.P.Fentanes, G.Cielniak, T.Duckett: Warped Hypertime Representations for Long-term Autonomy of Mobile Robots Arxiv, 2018. [bibtex]
-
T.Vintr, Z.Yan, T.Duckett, T.Krajník: Spatio-temporal representation for long-term anticipation of human presence in service robotics. In proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2019. [bibtex]