#DJI Onboard SDK ROS Packages
##Introduction
This is a ROS package for DJI OnBoard SDK.
It helps users handle the following commands and actions.
- The activation
- The flight control obtainment
- The flight control release
- The take off procedure
- The landing procedure
- The go home procedure
- The Gimbal control
- The attitude control
- The photo taking procedure
- The start/stop video recording procedure
- Local navigation (fly into a certain (X,Y,Z))
- GPS navigation (fly into a certain GPS coordinate)
- Waypoint navigation (fly through a series of GPS coordinates)
- Using WebSocket together with Baidu Map for navigation
- Using MAVLink protocol and QGroundStation
##How to use
- Install and configure your hardware correctly.
- Enter the following info into
dji_sdk/launch/sdk_manifold.launch.- APP ID
- APP Level
- Communication Key
- Uart Device Name
- Baudrate
- Use
roslaunch dji_sdk sdk_manifold.launchto start the core node. - Include the
dji_drone.hfromdji_sdk/include/dji_sdkinto your package and run it. (there also provides a python versiondji_drone.pyindji_sdk/src/dji_sdk)
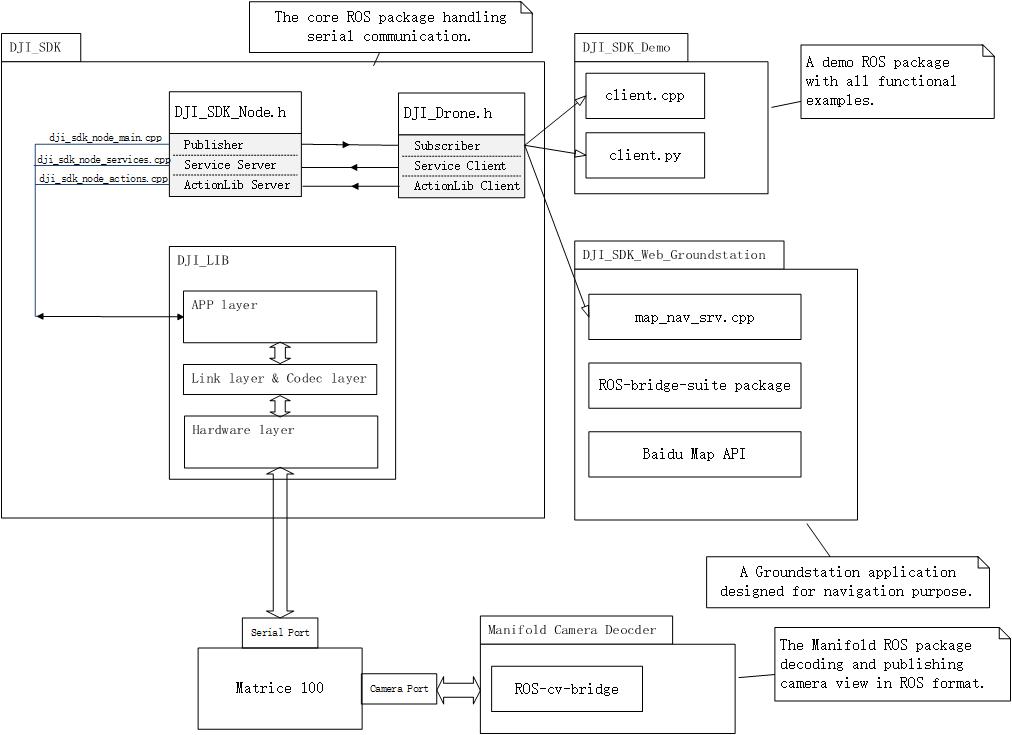
##System Structure
- dji_sdk: the core package handling the communication with Matrice 100, which provides a header file
dji_drone.hfor future use - dji_sdk_demo: an example package of using
dji_drone.hto control the Matrice 100 - dji_sdk_web_groundstation: a WebSocket example using ROS-bridge-suite, where a webpage groundstatino is provided
- dji_sdk_manifold_read_cam: a X3 video decoding package for Manifold, CATKIN_IGNOREd by defualt
- dji_sdk_dji2mav: a protocol converter making M100 compatiable with all MAVLink-protocol-dependent softwares
- dji_sdk_doc: all documents

{kind=link}
##System Environment The below environment has been tested.
- Operating System: Ubuntu 14.04, Manifold
- ROS version: ROS Indigo
#DJI Onboard SDK ROS例程
##简介
此ROS例程实现了以下功能:
- 激活 Matrice100 (以下简称M100)
- 获取 M100 控制权
- 释放 M100 控制权
- 向 M100 发送起飞指令
- 向 M100 发送降落指令
- 向 M100 发送返航指令
- 对 M100 进行姿态控制
- 对 M100 进行云台角度控制
- 向 M100 发送相机控制指令
- 控制 M100 进行 (x,y,z) 坐标导航
- 控制 M100 进行 GPS 坐标导航
- 控制 M100 进行航点飞行任务
- 通过 WebSocket 向 M100 发送网页地图生成的航点指令
- 通过 MAVLink 和 QGroundControl 控制 M100
##如何使用
- 按照文档配置好 M100
- 将激活信息输入至launch file:
dji_sdk/launch/sdk_manifold.launch- APP ID (在官网注册key后得到)
- API Level (key对应的 API 权限等级)
- Communication Key(在官网注册key后得到)
- Uart Device Name(串口设备名称)
- Baudrate(比特率)
- 运行
roslaunch dji_sdk sdk_manifold.launch来启动核心包。 - 将
dji_sdk/include/dji_sdk下的客户端头文件dji_drone.h引用到你自己的 ROS 包中,并运行它(我们也提供了python版本的客户端dji_drone.py)
##系统架构
- dji_sdk: 核心 ROS 包,处理所有与 M100 的串口通信并提供了
dji_drone.h的头文件供开发者引用。 - dji_sdk_demo: 一个调用
dji_drone.h控制 M100 的例子。 - dji_sdk_web_groundstation: 基于 WebSocket 的网页版地面站,依赖 ROS-bridge-suite 。
- dji_sdk_manifold_read_cam: Manifold专用 ROS 包,对禅思 X3 云台的视频信息进行解码输出视频流。默认通过
CATKIN_IGNORE禁用,需要手动启用。 - dji_sdk_dji2mav: MAVLink 协议转接器,使得 M100 可以支持任意使用 MAVLink 为协议的地面站软件。
- dji_sdk_doc: 所有的文档与图片信息。
#系统环境 此 ROS 包在如下系统中进行测试;
- 操作系统:Ubuntu 14.04, DJI Manifold
- ROS 版本:ROS Indigo