{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
Control NAO using Kinect Device ( using NAO.net, Windows Application and Kinect DLL)

- Main
- Type: Windows Application
- Rule: User Interface.
- Description: Project which Display Kinect Joints values and Robot data. and interact with user actions.
- dllKinect
- Type: Windows DLL
- Rule: Kinect - Windows Interface
- Description: Project which catch Required Events and live data values from Kinect.
- DllNAO.netV2
- Type: Windows DLL
- Rule: NAOqi - Windows Interface
- Description: Control NAOqi-Based Robots using C#, it is Improvement for original NAO.NET project listed down.
- Baku.libqiDotNet:
- Type: Windows DLL
- Rule: dotnet NAoqi Interface.
- Description: Unofficial .NET wrapper library for "qi Framework", the messaging library created by Aldebaran Robotics
- Kinect (V2 Recommended ) https://developer.microsoft.com/en-us/windows/kinect
- Windows Computer with USB3 Port
- NAOqi Robot ( optional ) : https://www.softbankrobotics.com/emea/en
-
Kinect SDK : https://download.microsoft.com/download/F/2/D/F2D1012E-3BC6-49C5-B8B3-5ACFF58AF7B8/KinectSDK-v2.0_1409-Setup.exe
-
NAOqi SDK : "pynaoqi-2.1.4.13.win32.exe" (Recommended version )
Download Page :
- Choregraphe : "choregraphe-suite-2.1.4.13-win32-setup.exe"( Recommended version )
Download Page : https://www.arabicrobotics.com/wp/?page_id=912
- NAOqi SDK Documetation :https://www.arabicrobotics.com/Aldebaran/aldeb-doc-2.5.7.1/
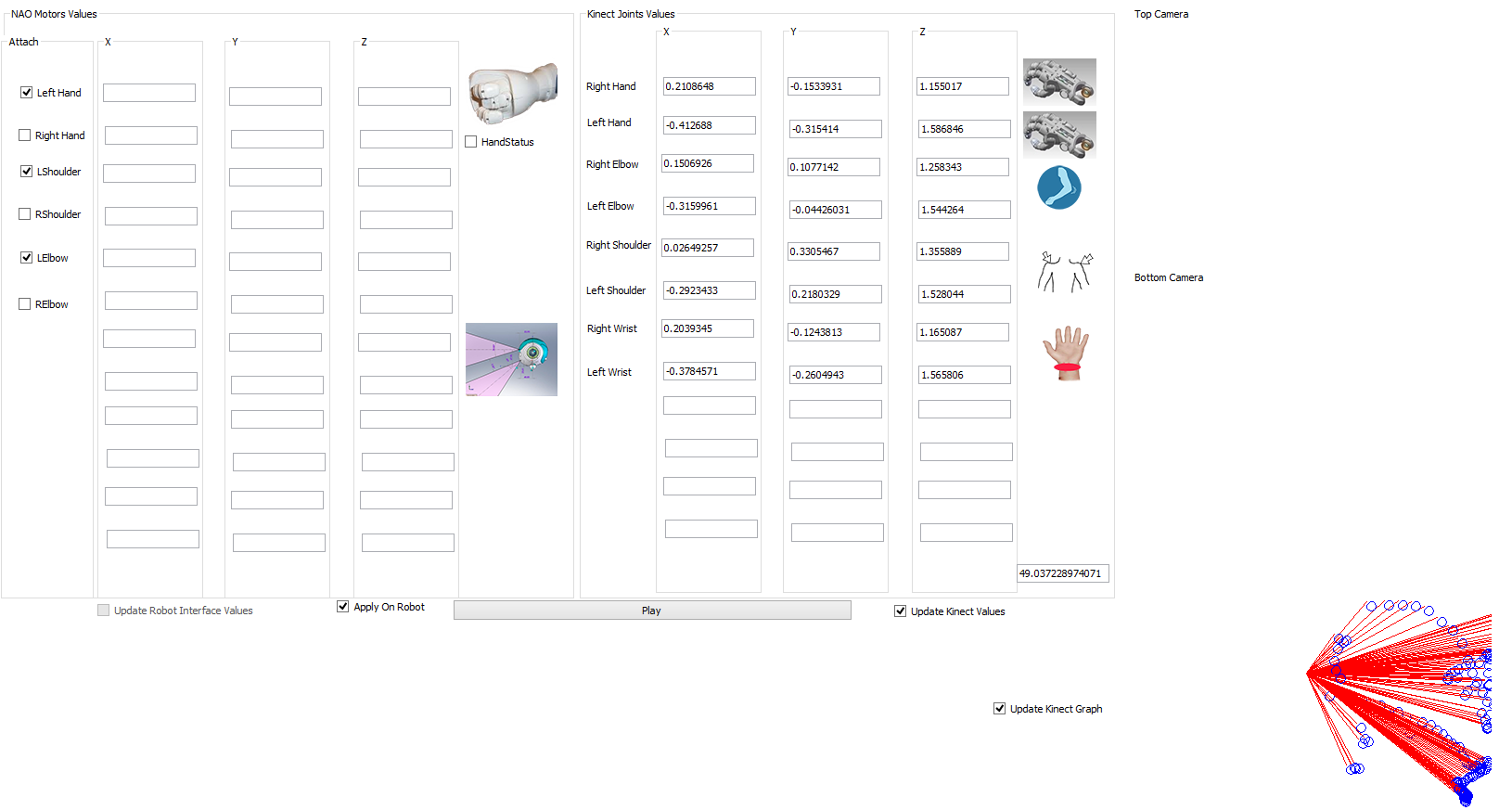
- Capture Joints Data
- Display joints data into Windows form Application
- Convert and send movements to Windows Application
- Send Movements to NAOqi Robot
- Apply Movements on physical Robot example (NAO Robot) Version 4/5
- Send Back Robot Moves (FW)
- Display NAOqi Robot Camera in Windows Application. (FW)
A. Kinect Catcher: Catch Kinect Joints and face rotation

B. Main application: Main control and switcher.
Back values to Controller Windows Application
Return current video position to Windows Application.