
2018.4.18更新逻辑回归模块
2018.4.20更新OpenCV自带BP网路模块
2018.4.26更新手撸BP模块
2018.8.08更新LeNet-5-based CNN模块(使用Pytorch)
-
Opencv自带BP网络+HOG
-
Logistic Regression content/LR
-
全局函数
-
CNN_pytorch
opencv2.4.11:使用HOG特征进行车标分类识别
工程基于本人早期课程设计,记录在博客园博客中---使用OpenCV实现车标识别。 Github上的版本是重构后的代码。
测试环境:win10+VS2017+OpenCV2.4.11
测试结果:100%识别
opencv的配置这里就不再赘述了。简单讲下工程的情况。
其实直接将图像灰度值作为网络输入也可以,本工程使用了人工提取的图像的HOG特征作为网络输入,输出为车标类别。
- 先将数据集手动划分成训练集和测试集,并分好类,比如第一类就放在文件夹名为
0的文件夹下,第二类就是1,如此类推。
当前程序只能处理10类以下车标,因为当前程序逻辑不支持10以上的数字识别(具体可以仔细看下代码)
所有训练集的图片放在train文件夹中,测试集放在test文件夹下。最终的文件树如下:
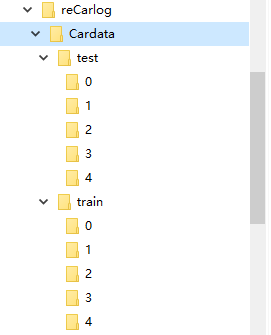
reCarlog是工程名,即Cardata和main.cpp同目录。- 测试集的类别数字和训练集的要一一对应。因为程序将要用它们作为分类依据。
- 在
main.cpp目录下准备两个文件,trainpath.txt和testpath.txt,用以保存所有训练集和测试集图片的路径。程序需要这两个文件来读取训练集和测试集的图片。举例如下(trainpath.txt)
./Cardata/train/0/train_citroen1.jpg
./Cardata/train/0/train_citroen10.jpg ./Cardata/train/0/train_citroen100.jpg ./Cardata/train/0/train_citroen101.jpg
建议使用相对路径。
这样,当我们读取一张图片的时候,可以利用图片的路径名称,通过split调用确定该车标的类别(使用切分字符'/',第4个值即类别(0,1,2,3,4...))
代码很简单,就一个main.cpp文件。大致分为以下3块
- 全局变量:比如整理好的数据集,标签集,HOG特征向量
- 全局函数:模块划分,使得
main函数不显得臃肿。 - 自定义网络类:
myNeraulNetwork用于搭建简单BP网络和训练预测
分3步:
- 训练集装载
- 定义网络+训练网络
- 测试网络
全局变量设定:
#define N_SAMPLE 1000
#define F_NUM 1764
#define CLASSNUM 5
float Data[N_SAMPLE][F_NUM]; // 数据存放
float Label[N_SAMPLE][CLASSNUM] // 标签存放
训练网络输入是两个二维矩阵,第一个矩阵是数据矩阵(第一维是样本个数N_SAMPLE,第二维是每个样本的特征向量是,宽度为F_NUM),第二个矩阵是标签矩阵,对应每个样本,都有一个类别标签,如果是第一类,则它的标签向量为1,0,0,0,0(本例是5维)。
这里主要提一下数据矩阵的第二维是怎么确定的。
每个样本的特征向量即每张图片的HOG特征。HOG特征是一个一维向量。
对于一张图片,使用一个滑动窗口以一定的步进滑动,分别获取每个窗口的特征值,是一般的人工图像特征提取方式。简单说下HOG特征的提取。
假设一张图片的维度是img_size=64x64,我们使用的滑动窗口大小为block_size=16x16,滑动步进stride=8x8,那么对一个这样的图像,能得到(64-8)/8 x (64-8)/8=7x7=49个窗口,对于每个窗口block,HOG特征细分为胞元cell_size=8x8。于是一个block就有2x2=4个胞元,每个胞元默认有9个特征值,所以在上述参数的情况下,HOG特征的维度为49x4x9=1764,这也是本工程的默认参数。
opencv自带HOG特征提取,
img_size、block_size、stride和cell_size都需要自行设定,因此需要事先计算好特征维度,才能确定数据矩阵第二维的宽度。
read trainpath.txt; // 读取路径文件
for each trainImg in trainpath.txt :
getHOG(trainImg) // 获取HOG特征
getLabel according to its path
put its hog into Data[][]
put its label into Label[][]
对opencv自带网络类进行了简单的封装,如下:
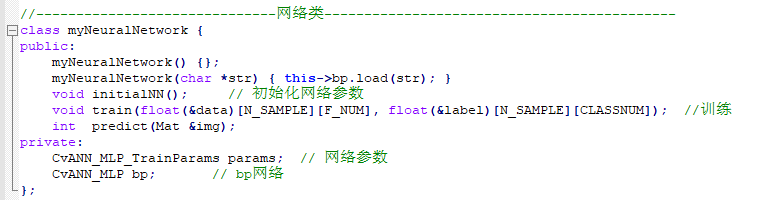
initialNN。
读取测试文件,输入网络,获得输出。
输入为每次一个图片,所以输入的二维矩阵为
test[1][F_NUM]。myNerualNetwork().predict(img)获得一个预测值,可以跟实际值(分析文件路径名获得)做对比,得到分类正确率。
逻辑回归基于简单的代数思想: $$ \notag \hat y=\sigma(W^TX+b) $$ 对于多分类,运用 one-vs-rest的思想,可以看成多个二分类问题,例如,对于一个5分类问题,训练5个分类器,对于每个分类器,将1个分类作为正样本,剩余类作为负样本,这样,对于每个分类器来说,就是计算一个属于当前分类的概率。5个分类器的最终结果是: $$ \notag [\hat y_0,\hat y_1,\hat y_2,\hat y_3 \hat y_4] $$ 则最终分类为 max_value_index。
代码使用python完成。
datasets_utils.py
完成两个任务.
- 根据正样本索引号完成训练集读取
load_train_data - 读取测试集
load_test_set
lr.py
LR分类器构建与识别,函数层级如下
lr_model() #构建1个lr分类器
initial_parameters() # 初始化模型参数
optimize() #优化
propagate() # 梯度下降
estimate() # 评估模型
predict() # 测试测试集
dataModel.py
根据Cardata/生成 h5数据集,该数据集包含4个部分
data['train_X']:训练集data['train_Y']:训练集标签data['test_X']:测试集data['test_Y']:测试集标签
首先看下LeNet5的结构:

最初这个模型是Yann LeCun 用来做一个手写体识别的task。由于模型简单计算量小,这里非常适合我们的车标数据集。
使用python 模块 h5py 处理了下数据集,使得数据集由车标的灰度图像素组成。
使用下面的代码可以查看任意一张训练集或者测试集的图(调用data_utils里的函数)
from data_utils import showImage
import h5py
dataset=h5py.File('carDatasets.h5','r')
showImage(dataset=dataset,label='train_X',index=10)
dataset.close()如果是查看测试集,则label='test_X' ,另外确保index不超出范围(训练集1000图,测试集500图)
下面是结果示例:

注: 从左到右依次是 雪铁龙、大众、一汽、福田、本田
首先确保working directory 在carLogoRec\CNN_Pytorch\下
训练模型:
from cnn_lenet5 import *
model =LeNet5()
train(model,num_epoch=10,batch_size=16,learning_rate=0.01,save=False)save参数用来决定模型参数是否存储到./ModelParams文件夹下,该文件夹下有已训练好的参数文件
加载模型:
model=LeNet5()
model=loadModel(model)则会自动加载文件夹下的参数。
预测一张图片:
imgSample文件夹下有几种车标的样例,根据输入的文件名可以预测图片所属车标:
predict(model,img_path='./imgSample/Honda_sample.jpg')最后感谢大家的耐心,能看完这个简单的document。如果这个简单的工程对你有帮助,还望大家不吝惜右上角的star喔
Licensed 996ICU License.
总之有问题欢迎大家在issue里提,我会持续关注这个仓库的:)