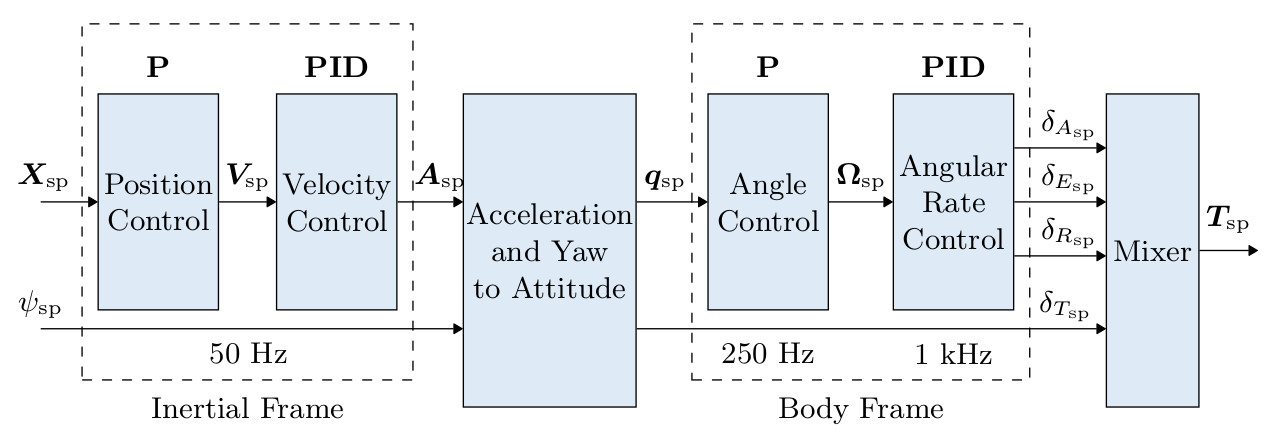
A simple quadcopter filght controller designed to work in angle control mode (diagram).
All parameters are grouped in config.h.
Switch OPERATING_MODE to perform ESC calibration and IMU calibration.
Switch DEBUG to visualize print messages in the serial monitor.
The control loop frequency is about 80Hz.
{kind=link}

Arduino libraries:
- MPU9250==0.4.8
- AutoPID==1.0.3
- Board: Arduino Mega 2560
- Imu: MPU 9250
- Receiver: Flysky FS-IA6
- Motor/ESC: A2212 1000KV Brushless Motor 30A ESC
- Propeller: 1045
- Rangefinder: HC-SR04
- Battery: LiPo 3S 35C XT60
- DC/DC stepdown: LM7805
- 30A fuse
- 4x motor.stl
- 4x holder.stl
- 4x hollow alluminium rod 10x10x130 mm (to link motor and holder)
- 1x plastic disk diameter ~220 mm (the base where to anchor holders with 3M bolts)
- 1x cover.stl

