Author:
杨磊
E-mail:
[email protected]
Date:
2017-07-16
Description:use Kinect and voice to control jet in GTA: San Andreas on windows

kinect 各节点名称

节点与节点间生成以下向量
- spineVector:脊柱所在向量
- shoulderVector:两个肩膀节点所在向量
- elbowVector:两个肘关节所在向量
- shoulderElhow:手臂的上臂向量
- elbowWrist:手臂的前臂向量
- hipKnee:大腿的向量
- bodyz:由spineVector和shoulderVector叉积求得的身体平面的法向量
- 默认状态
动作:人面向Kinect 竖直战立,手臂的上臂与身体在同一平面, 手臂的前臂正对着Kinect原理:无映射按键:无功能:默认状态 啥也不做

- 垂直起飞
动作:保持上臂与身体在同一平面, 前臂正对着Kinect,将上臂抬起,使之尽量与肩膀齐平原理:计算shoulderElhowLeft 和 shoulderElhowRight的夹角 大于100°则垂直起映射按键:W功能:缓慢垂直向上升空

- 垂直下降
动作:上半身与默认状态保持一致,脚呈半蹲姿势原理:hipKneeLeft与向量(0,0,-1)的夹角若小于80°则激发映射按键:S功能:缓慢垂直降落

- 左倾斜/右倾斜

动作:保持左右手肘有较大高度落差原理:elbowVector 和 向量(0,1,0)的角度小于75° or 大于105° 则激发映射按键:A/D功能:飞机左倾斜/右倾斜


- 前倾斜/后倾斜

动作:保持前臂与水平面有较大角度原理:elbowWrist 和 spineVector的角度小于80° or 大于120° 则激发映射按键:up array/down array功能:飞机前倾斜/后倾斜


- 左旋转/右旋转

动作:上半身左/右旋转一定角度原理:shoulderVector和 向量(0,0,1)的角度小于75° or 大于105° 则激发映射按键:Q/E功能:飞机的方向在水平左旋转/右旋转


- 加速/减速

动作:前臂水平张开45°/前臂水平聚拢45°原理:elbowWrist 和 shoulderVector 的角度小于45° or 大于135° 则激发将左右手所得的角度再进行相减 再进一步判断映射按键:Num8/Num2功能:飞机向前加速/减速


| 语音 | 映射按键 | 功能 |
|---|---|---|
| get in car | F |
上载具 |
| get out car | F |
下载具 |
| get airplane | "jumpjet" |
自动输入作弊码jumpjet 获得鹞式战斗机 |
| up wheel | 2 |
收/放飞机起落架 |
| lock | right Ctrl |
锁定载具目标 以发射导弹 |
| flash | right Ctrl |
发送干扰弹 以躲避导弹 |
| radio | r |
切换电台 |
| fire | Num0 |
攻击/开火/发送导弹 |
原理:
求角度公式

代码:
def degreeOfVictor(p1,p2):
dotProduct = (p1*p2).sum()
norm = lambda p:(p**2).sum()**0.5
angle = dotProduct/(norm(p1)*norm(p2))
arccosDegree = lambda x:np.degrees(np.arccos(x))
degree = arccosDegree(angle)
return degree优势:
- 不随着人的身高大小,高矮胖瘦,所在位置而变化
- 不同动作间 相互影响极小
- 相对直接用(x,y,z),动作的状态空间多,数据稳定
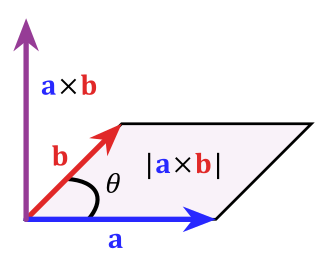
原理:
求肩膀所在向量a 与脊椎所在向量b 的叉积即为上半身所在平面的法向量

在开发过程中, 我详细考察了各种语音识别方案
| 方案 | 准确率 | 延迟 | 其他方面 | 评估结果 |
|---|---|---|---|---|
| 离线方案 | 极低 | 0.5~1.5 s | 由于识别需要占用较多系统资源 会造成游戏卡顿 | 放弃 |
| 百度云语音 | 一般 | 国内网 1.7~3.0 s | 优先考虑 | |
| 微软认知服务 | 较好 | 国内网 5~10 s | 可以考虑 | |
| Google Cloud Platform | 较好 | IPV6代理 > 8 s | 可以考虑 |
最终 我将 百度云语音识别API,微软认知服务API 和 Google Cloud Platform 以多线程的形式进行融合
只有最先被识别的语音命令会被执行,即提高了速度,又提高了命中率
原理:
- 在点集中生成所有含有3个点的子集的组合
- 对每一个子集生成一个平面
- 将每一个平面的法向量的单位向量相加得到所求平面的法向量
-
准备一套带有电源和USB接口的 Kinect设备(最好是Kinect for Windows版本)
-
安装Kincet SDK 1.8 ,KinectRuntime 1.8
-
准备一个Python 2.7 32 bit 环境(!非常重要 KinectSDK 1.8 只支持32 bit Python 建议安装一个32位的Miniconda2)
-
使用命令
pip install -r requirements.txt安装所需要的包 -
安装游戏GTA: San Andreas
-
运行游戏
gta_sa.exe在设置中的载具按键设置处 设置一下按键映射 原按键与新按键的映射为
{
'up':'i',
'down':'k',
'n8':'o',
'n2':'l',
'rCtrl':'lAlt',
}
结果如下图
 6. 最后,使用命令
6. 最后,使用命令 python jetInKinect.py 开启Kinect 即可操纵
-
语音控制部分同时使用了 百度云语音识别API,微软认知服务API 和 Google Cloud Platform,以同时提高速度和准确性,但准确率和网络延迟仍旧不够理想
-
对于新手来说 就算用手柄来控制GTA中的鹞式战斗机也非常困难,所以 用身体来控制需要一定的适应期(对于熟悉用键盘开飞机的作者来说 用了半小时才熟悉)
-
由于Kinect传感器为红外视频,所以 建议避免穿黑色衣服(黑色衣服会吸收红外线 增加传感器误差)
-
由于程序是通过键盘映射来操作的 键盘为点按的布尔操作 ,实际上 体感更适合于类似手柄摇杆的标量操作 这将会大大提升操控体验
-
语音识别可改为本地的预训练好的神经网络来识别
生产实习开始时,由于微软几乎没有为Pykinect写文档 也缺乏参考代码,我还在考虑是使用C#还是Python来开发,最后 还是因为numpy和iPython的便利性 硬着头皮学Pykinect,由于微软只发布了一个pykinect的demo,所以熟悉API花费了一周多的时间
理解完API后 灵机一动 想做飞行控制,由于飞行本就十分复杂,便详细思考控制方案,最终决定 将一部分不常用事件交由语音控制
在后期numpy和iPython的便利性发挥了作用,体感数据处理得挺顺利的。后来才发现语音控制是一个坑,做了好多工作 包括查找与评估各个方案,对接各个API,多线程融合机智,但语音控制的效果仍不够理想
总之 此次Kinect开发 即有趣又有收获
- PyKinect - write Kinect games using Python!
- 向量 - 维基百科,自由的百科全书
- 向量积 - 维基百科,自由的百科全书
- Geometry Module SymPy documentation
- Pygame v1.9.2 documentation
- PS/2 Keyboard - OSDev Wiki
- 百度语音-API参考-简介-百度云
- 必应语音 API-认知服务试用体验 | Microsoft Azure
- speech_recognition: Speech recognition module for Python, supporting several engines and APIs, online and offline.