@@ -67,3 +67,99 @@ robot: Raspberry Pi Mouse
6767 ```
6868
6969 
70+
71+ ## RGBカメラによるライントレース {: #camera_line_follower}
72+
73+ === "ROS 2"
74+ 次のコマンドを実行します。
75+
76+ シミュレータの起動
77+
78+ ```sh
79+ ros2 launch raspimouse_gazebo raspimouse_with_line_follower_field.launch.py use_rgb_camera:=true camera_downward:=true
80+ ```
81+
82+ カメラライントレースを実行
83+
84+ ```sh
85+ ros2 launch raspimouse_ros2_examples camera_line_follower.launch.py mouse:=false use_camera_node:=false
86+ ```
87+
88+ 走行開始
89+
90+ ```sh
91+ ros2 topic pub --once /switches raspimouse_msgs/msg/Switches "{switch0: false, switch1: false, switch2: true}"
92+ ```
93+
94+ 走行停止
95+
96+ ```sh
97+ ros2 topic pub --once /switches raspimouse_msgs/msg/Switches "{switch0: true, switch1: false, switch2: false}"
98+ ```
99+
100+ カメラライントレースにおけるパラメータは[こちら](https://github.com/rt-net/raspimouse_ros2_examples?tab=readme-ov-file#parameters)を参照してください。
101+
102+ 
103+
104+ ## SLAM {: #slam}
105+
106+ === "ROS 2"
107+ 次のコマンドを実行します。
108+
109+ シミュレータの起動
110+
111+ ```sh
112+ ros2 launch raspimouse_gazebo raspimouse_with_lakehouse.launch.py lidar:=urg
113+ ```
114+
115+ `lidar`は`urg`、`lds`、`rplidar`のいずれかを指定してください。
116+
117+ キーボードで操作
118+
119+ ```sh
120+ ros2 run teleop_twist_keyboard teleop_twist_keyboard
121+ ```
122+
123+ SLAMを実行
124+
125+ ```sh
126+ ros2 launch raspimouse_slam pc_slam.launch.py
127+ ```
128+
129+ Raspberry Pi Mouseを走らせて地図を作成
130+
131+ 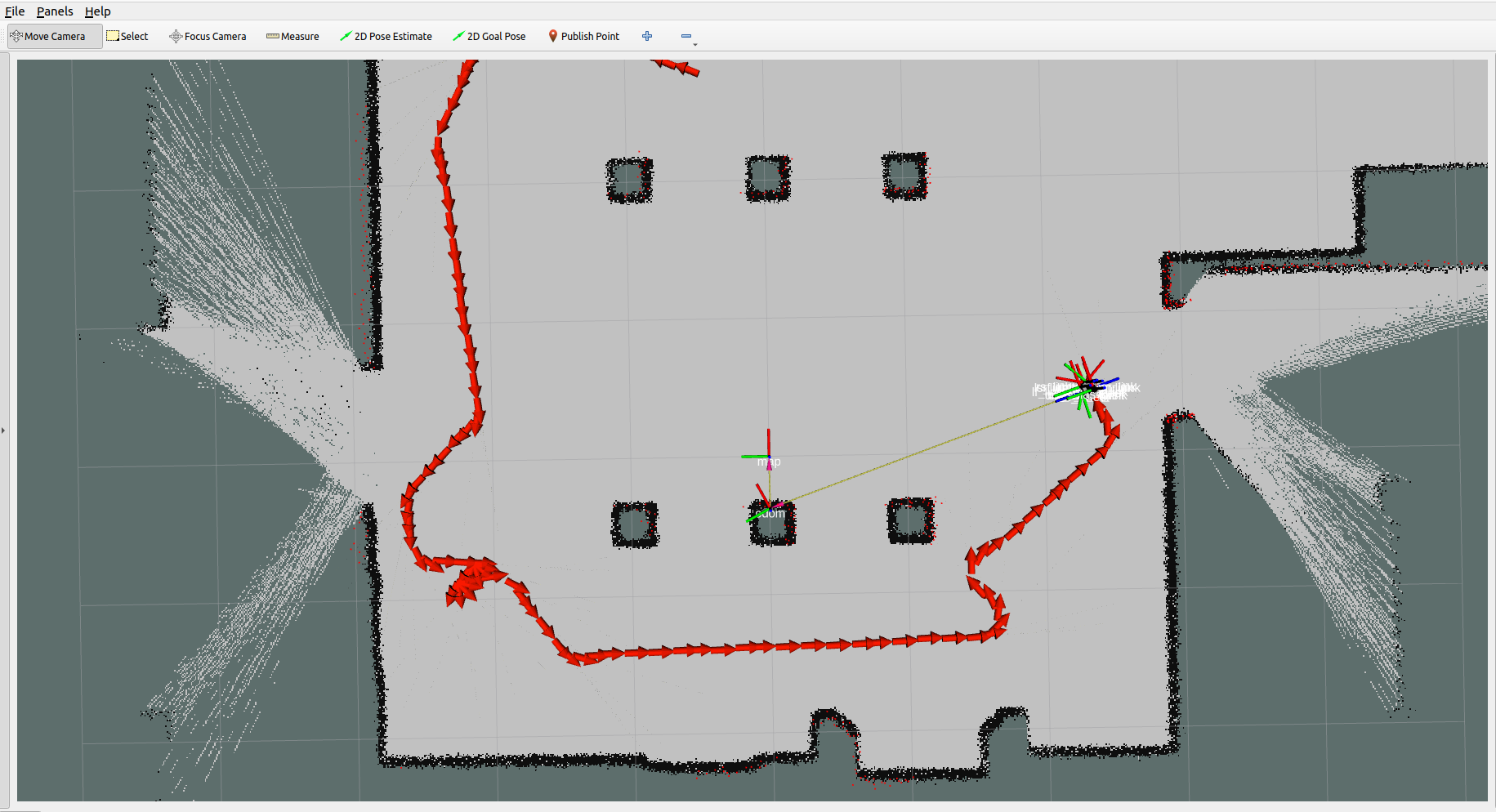
132+
133+ 作成した地図を保存
134+
135+ ```sh
136+ ros2 run nav2_map_server map_saver_cli -f ~/MAP_NAME
137+ ```
138+
139+ `MAP_NAME`は任意の名前を指定できます。
140+
141+ 
142+
143+ ## Navigation {: #navigation}
144+
145+ === "ROS 2"
146+ 次のコマンドを実行します。
147+
148+ シミュレータの起動
149+
150+ ```sh
151+ ros2 launch raspimouse_gazebo raspimouse_with_lakehouse.launch.py lidar:=urg
152+ ```
153+
154+ `lidar`は`urg`、`lds`、`rplidar`のいずれかを指定してください。
155+
156+ Navigationを実行
157+
158+ ```sh
159+ ros2 launch raspimouse_navigation pc_navigation.launch.py map:=$HOME/MAP_NAME.yaml
160+ ```
161+
162+ 引数`map`にはSLAMで作成した地図ファイルのパスを指定してください。
163+
164+ 
165+
0 commit comments