This code is used to create an F16 DED using the following hardware
- 2.8" OLED Module 256x64 display. Must be SSD1322 compatible
- Amazon: https://www.amazon.com/gp/product/B0CHPCRLVF
- See: docs/7-1.jpg & docs/8-1.jpg for display manual
- ESP32 Dev Board (esp32doit-devkit-v1)
- Amazon: https://www.amazon.com/gp/product/B08246MCL5
- Newer ESP32-S3 boards will likely work. Just check V_SPI pins
- esp32-s3 - https://www.amazon.com/LuatOS-Development-Bluetooth-Interfaces-Compatible/dp/B0CDX87YX4
- MACOS - install serial driver https://github.com/WCHSoftGroup/ch34xser_macos
- platformis board: esp32-s3-devkitc-1
- esp32-s3 - https://www.amazon.com/LuatOS-Development-Bluetooth-Interfaces-Compatible/dp/B0CDX87YX4
{kind=link}
Code inspiration came from the following repos/threads:
- https://github.com/jg-storey/ded
- https://github.com/wiggles5289/Orange-Viper-Simulations/tree/main/F16
- https://forum.dcs.world/topic/261806-f16-ded-with-ssd1322-and-dcs-bios/page/3/
- write unit tests
- platformio - https://platformio.org/install
- Clone this repo
git clone https://github.com/peterb154/F16-DED.git cd F16-DED - Create/update your wifi settings in src/secrets.h.
- See an example in src/secrets-example.h
- build and upload DCS-BIOS WiFi enabled versionto your board
pio run -e WIFI -t upload && pio device monitor
| OLED (Pin) | Wire * | ESP32 (Pin) | #define ** |
| ----------- | ------ | -------------- | ---------- |
| VDD (2) | WHT | 3v3 | |
| GND (1) | BLK | GND | |
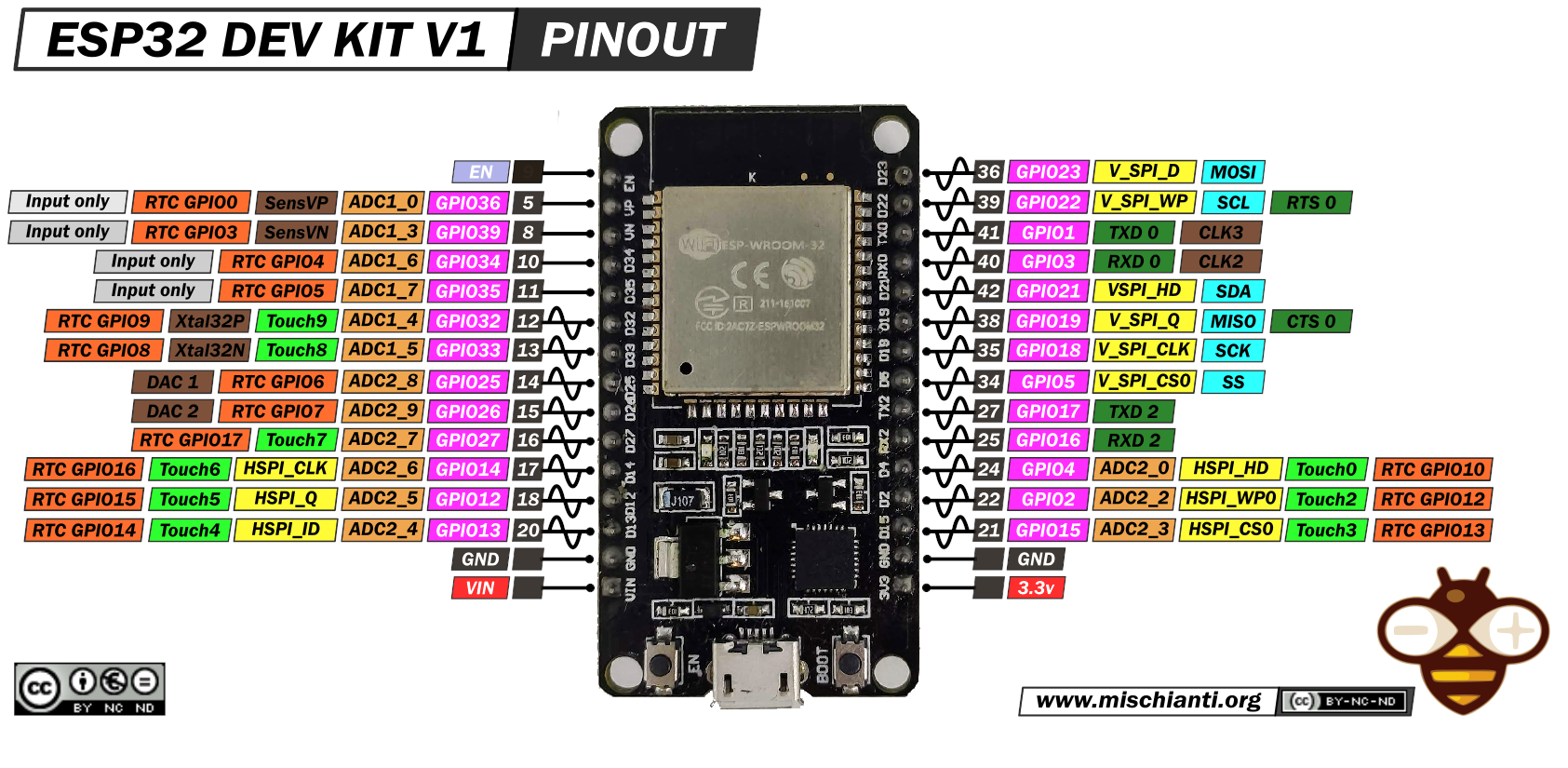
| SDIK D1 (5) | PPL | V_SPI_D (23) | |
| SCLK D0 (4) | GRY | V_SPI_CLK (18) | |
| CS (16) | YEL | V_SPI_CS0 (5) | V_SPI_CS0 |
| DC (14) | BLU | GPIO (27) | SPI_DC |
| RES (15) | GRN | GPIO (26) | SPI_RESET |
- Note *: These are my wire colors, yours will likely be different
- Note **: Update
#definestatements as required in src/main.cpp - See: https://mischianti.org/wp-content/uploads/2020/11/ESP32-DOIT-DEV-KIT-v1-pinout-mischianti.png for ESP32 dev kit v1 pinout
{kind=link}
See case/ for stl files. Print at normal 20% infill, no supports. Its a very simple design that requires no fasteners.
- On your DCS machine, Install latest Skunkworks version of DCS-BIOS - https://github.com/DCS-Skunkworks/dcs-bios/releases
- You dont need to so the socat steps, we'll use wifi baby
- On your DCS machchine, Install DCS-Nexus mdns router - https://github.com/DCSBIOSKit/DCS-Nexus
- As of 2023-10-28: clone the repo
git clone https://github.com/DCSBIOSKit/DCS-Nexus && cd DCS-Nexus - create a virtual environment
python -m venv venv - run
venv\Scripts\python Nexus.pyw
- As of 2023-10-28: clone the repo
- Fly the F16 in DCS and enjoythe DED