Strange LIDAR returns for various robots #888
Comments
|
The boxes seen in the gagarin and qav500 are effect of the min range associated with the laser sensors, which are currently set at 0.8 meters. The returns for EXPLORER_R2 match the robot model in simulation. The robot description seen in rviz is not an accurate reflection of the physical robot. The strange returns for CSIRO_DATA61_DTR are also related to a min range of 0.3 meters. |
|
Is the minimum distance using L1 norm then? I would expect default distance vectors to form a spherical pattern and not a box. |
|
I left out an important piece of information. The lidar is simulated using a camera with cube maps. We set the camera near clip distance to the laser minimum range. The effect is the box pattern you see. A fix would require changing the internal camera implementation to use a smaller near-clip and then clip the ranges after the GPU rendering process. |
|
I was going to ask the same question about the Marble HD2 lidar returns, but I think that answers it. Thanks for the info!
|

|
Can't it at least partly be caused by gazebosim/gz-sensors#128 ? This is CTU_CRAS_NORLAB_SPOT_SENSOR_CONFIG_1: Robot parallel with world axes:
Robot about 30° to world:
Robot 45° to world:
Yellow points mark those closer than 0.2 m from the sensor. |



|
Ahh, some of the problems here could actually be consequences of gazebosim/gz-sensors#131 . Mitigation should be simple - just crop the pointcloud 1 cm after min range and 1 cm before max range. |
|
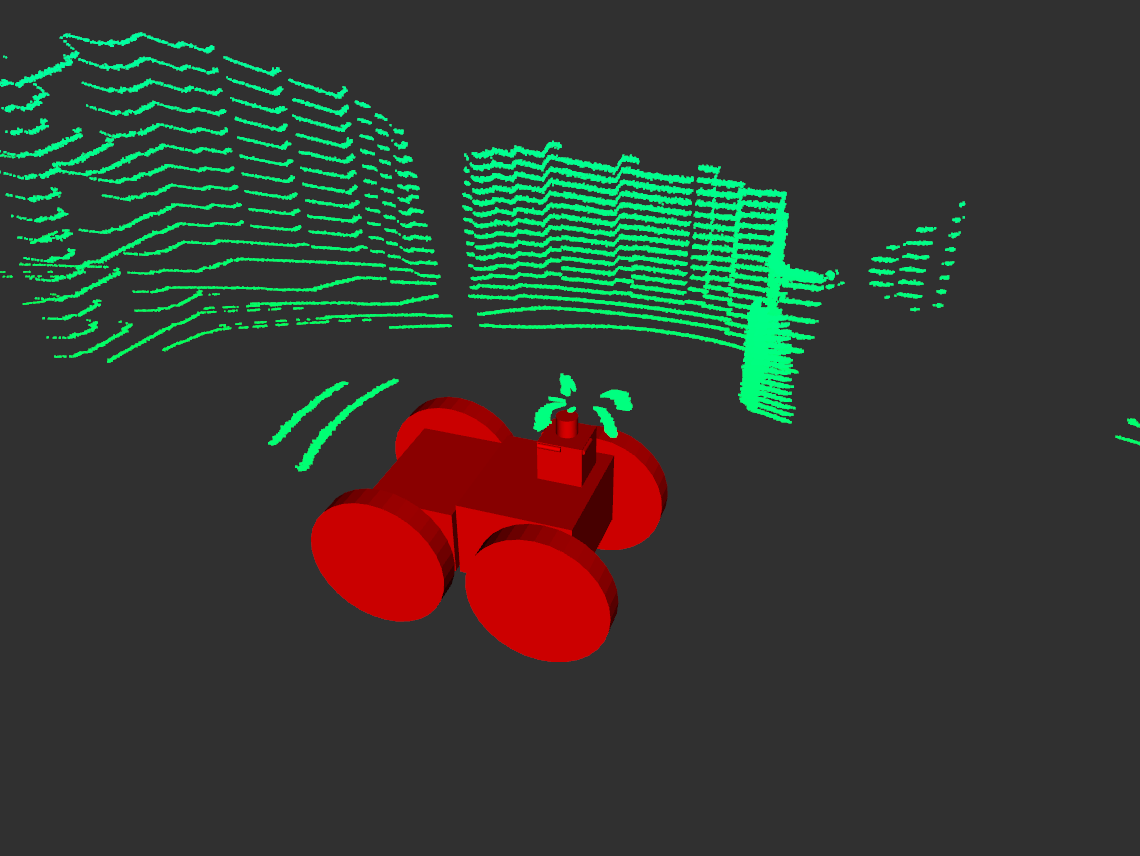
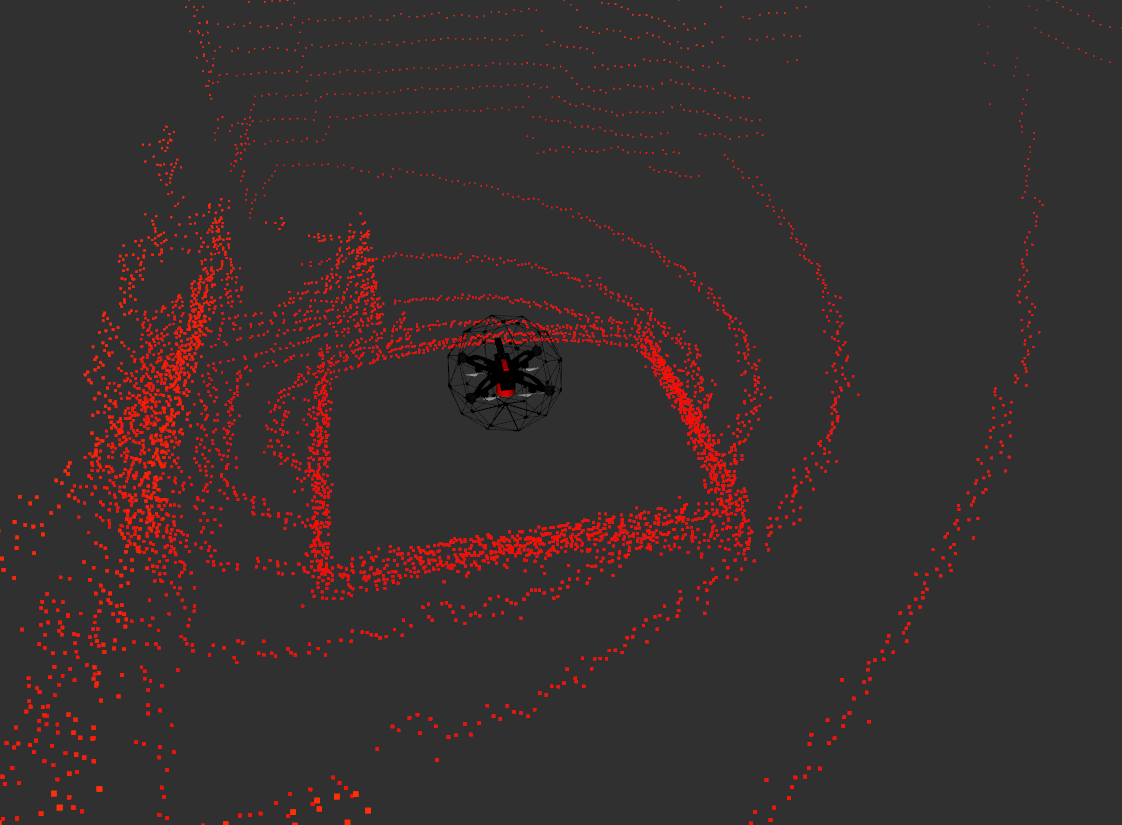
created gazebosim/gz-rendering#356 to fix the incorrect near clip plane issue. Here are the point clouds that I get with the above robots. The lidar points now form a spherical pattern at the bottom and incorrect points that don't correspond to any robot geometry are gone.
|




Looking through some of the robots, I've noticed that the LIDAR returns are sometimes wonky, typically but not always if part of the scan intersects robot geometry. I haven't exhaustively checked them all but below are a few for which it is particularly noticeable. For the UGV's the self intersecting scan is somehow displaced from the actual robot geometry, and for the UAV's there is a weird box shaped thing going on.
CSIRO_DATA61_DTR
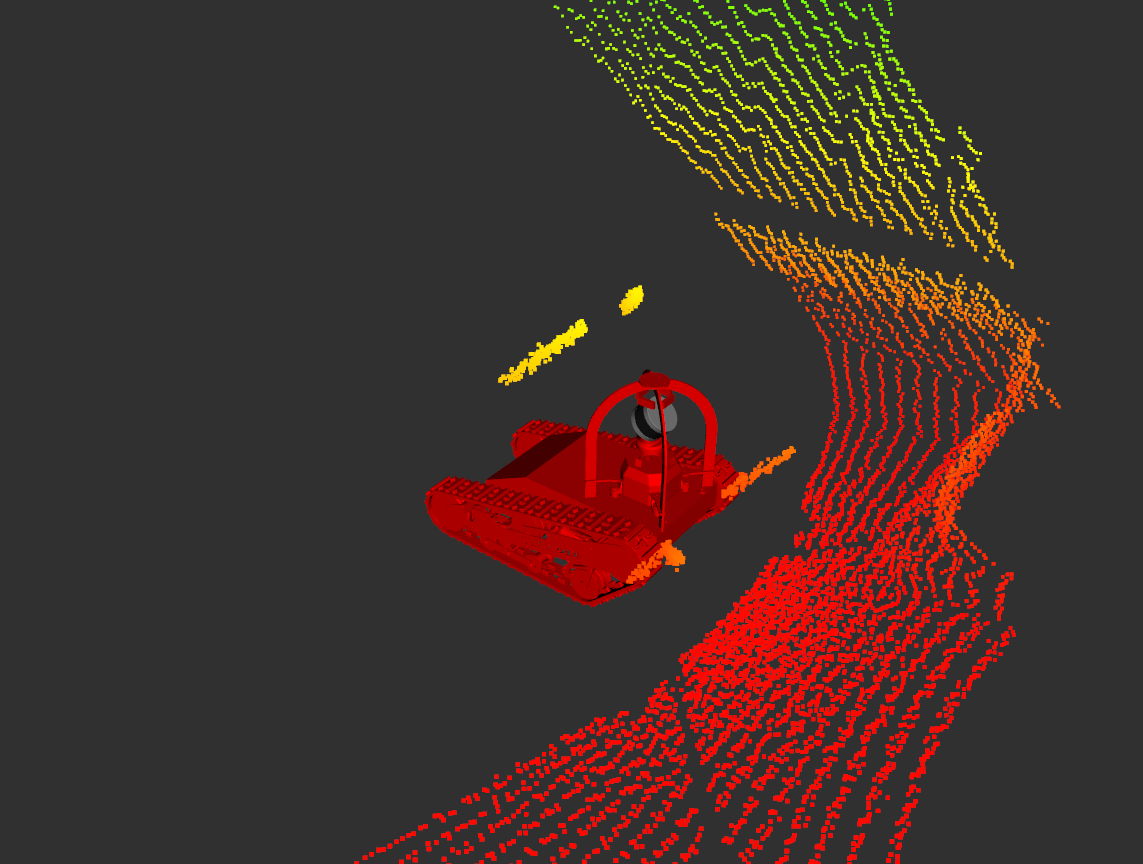
EXPLORER_R2
MARBLE_QAV500:
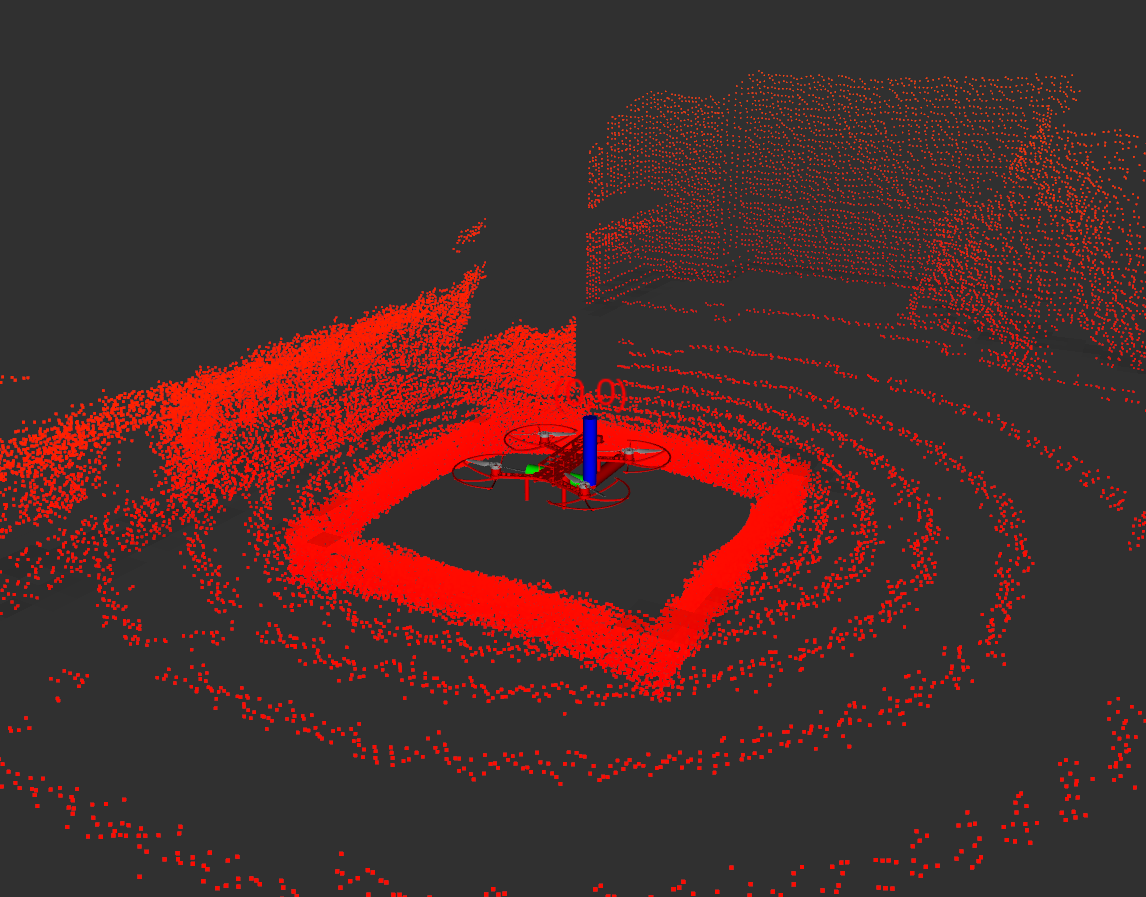
CERBERUS_Gagarin:
The text was updated successfully, but these errors were encountered: