Investigate and implement Micro ROV Thruster change #42
Comments
|
This has now been confirmed |
|
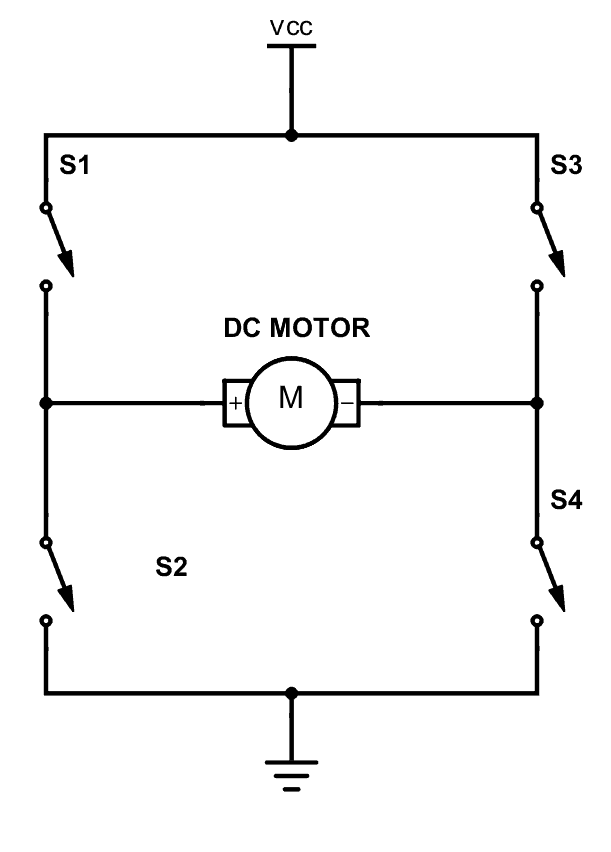
Can probably control speed -100 to 100 (or -1 to 1?). Needs 4 binary outputs as per the diagram. Opposite corners need to be activated to either forward or reverse. So S1 - S4 need to be digital output pins on the Arduino. setValue would take 1 parameter which is the speed as above. This would then control the 4 digital pins as follows. For forward: S4 activated (high), and S1 with the normal Arduino PWM control taking in the speed parameter. S2 and S3 would be deactivated (low) For reverse: S2 activated (high), and S3 with the normal Arduino PWM control taking in the speed parameter. S1 and S4 would be deactivated (low) |
|
S1 and S3 would probably be connected to the thruster control board because PWM, except the PWM will be full 100% not only setting microsecond widths like with ESCs |
Currently the assumption in the code is that the Micro ROV is using an ESC controlled thruster like the other 8 on the main ROV body.
However, there are some hints in the Electrical team's documentation that this thruster will be using an H-bridge:
Which means only binary forward backward control - no speed control. Therefore, a new class will likely need to be created to solve this problem.
The text was updated successfully, but these errors were encountered: