移动端查看命令行:http://树莓派ip:8081
启动:sudo motion
关闭:sudo killall -TERM motion
重启服务:sudo service motion restart
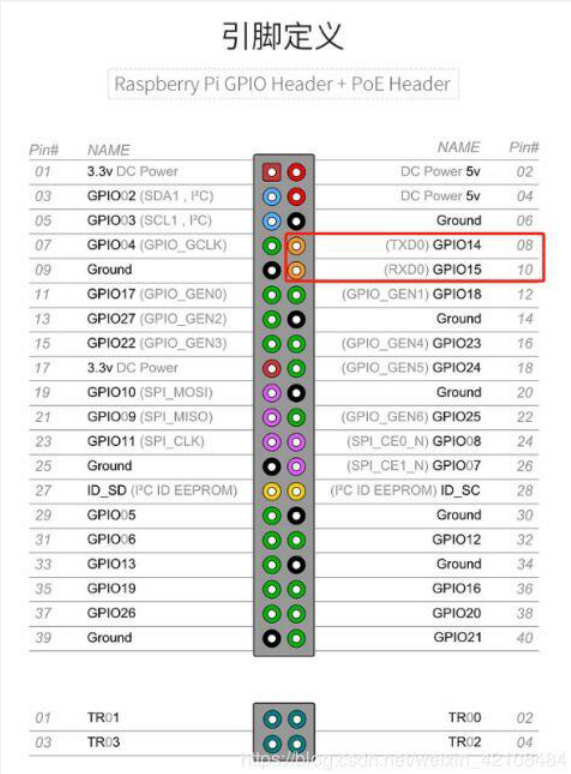
sudo minicom -D /dev/ttyUSB0 -b 115200

1、vi ~/.vnc/xstartup(需要提前下好gnorm关键桌面组件)
#!/bin/sh
#Uncomment the following two lines for normal desktop:
#unset SESSION_MANAGER
#exec /etc/X11/xinit/xinitrc
export XKL_XMODMAP_DISABLE=1
unset SESSION_MANAGER
unset DBUS_SESSION_BUS_ADDRESS
[ -x /etc/vnc/xstartup ] && exec /etc/vnc/xstartup
[ -r $HOME/.Xresources ] && xrdb $HOME/.Xresources
xsetroot -solid grey
vncconfig -iconic &
x-terminal-emulator -geometry 80x24+10+10 -ls -title "$VNCDESKTOP Desktop" &
x-window-manager &
#mate-session &
gnome-panel &
gnmoe-settings-daemon &
metacity &
nautilus &
gnome-terminal &
2、sudo chmod 777 ~/.vnc/xstartup
3、vncserver -kill :2
4、vncserver -geometry 1920x1080
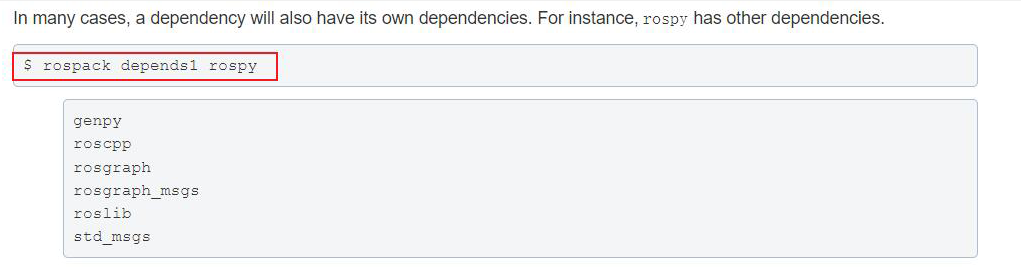
编译完成后需要将编译生成的相关文件加入环境变量 ,便于ROS环境可以识别执行命令如下所示,该命令是临时给终端加入环境变量,意味着您如果重新打开新的终端,也需要重新执行如下命令。
cd catkin_ws
为了重新打开终端后,永久不用执行上述添加环境变量的命令,可以进行如下操作。
source devel/setup.bash
source ~/.bashrc