Running OKVIS with zr300 #19
Comments
I can't run with ZR300,it happens this errors terminate called after throwing an instance of 'visensor::exceptions::ConnectionException' |
I can't run with ZR300,it happens this errors terminate called after throwing an instance of 'visensor::exceptions::ConnectionException' |
Hi,
I'm trying to run OKVIS on a data set captured by a ZR300 which also contains additional information (like joint odometry and lidar scans) from the robot it is mounted on. I'm currently using calibration information from [1], because my own calibration provides somehow false information. The config file looks therefore like that:
cameras:
- {T_SC: # fisheye
[ 1.0, 0.0, 0.0, 0.0067,
0.0, 1.0, 0.0, 0.0015,
0.0, 0.0, 1.0, -0.0073,
0.0, 0.0, 0.0, 1.0],
image_dimension: [640, 480],
distortion_coefficients: [0.0048721263900003645, 0.013074922065542347, -0.004719549370669489, 0.0005900323796213622],
distortion_type: radialtangential,
focal_length: [768.6436773886262, 765.9343209704857],
principal_point: [317.91945463536155, 241.50294129099476]}
camera_params:
camera_rate: 30 # just to manage the expectations of when there should be frames arriving
sigma_absolute_translation: 0.0 # The standard deviation of the camera extrinsics translation, e.g. 1.0e-10 for online-calib [m].
sigma_absolute_orientation: 0.0 # The standard deviation of the camera extrinsics orientation, e.g. 1.0e-3 for online-calib [rad].
sigma_c_relative_translation: 0.0 # The std. dev. of the cam. extr. transl. change between frames, e.g. 1.0e-6 for adaptive online calib (not less for numerics) [m].
sigma_c_relative_orientation: 0.0 # The std. dev. of the cam. extr. orient. change between frames, e.g. 1.0e-6 for adaptive online calib (not less for numerics) [rad].
timestamp_tolerance: 0.005 # [s] stereo frame out-of-sync tolerance
imu_params:
a_max: 176.0 # acceleration saturation [m/s^2]
g_max: 7.8 # gyro saturation [rad/s]
sigma_g_c: 4.2e-2 # gyro noise density [rad/s/sqrt(Hz)]
sigma_a_c: 4.5e-4 # accelerometer noise density [m/s^2/sqrt(Hz)]
sigma_bg: 0.03 # gyro bias prior [rad/s]
sigma_ba: 0.1 # accelerometer bias prior [m/s^2]
sigma_gw_c: 1.4e-2 # gyro drift noise density [rad/s^s/sqrt(Hz)]
sigma_aw_c: 1.5e-4 # accelerometer drift noise density [m/s^2/sqrt(Hz)]
tau: 3600.0 # reversion time constant, currently not in use [s]
g: 9.81007 # Earth's acceleration due to gravity [m/s^2]
a0: [ 0.0, 0.0, 0.0 ] # Accelerometer bias [m/s^2]
imu_rate: 200
# tranform Body-Sensor (IMU)
T_BS:
[1.0000, 0.0000, 0.0000, 0.0000,
0.0000, 1.0000, 0.0000, 0.0000,
0.0000, 0.0000, 1.0000, 0.0000,
0.0000, 0.0000, 0.0000, 1.0000]
The rest of it stayed unchanged to the here committed version. (If the error lies within the other part of the file, then i am happy to get a hint too)
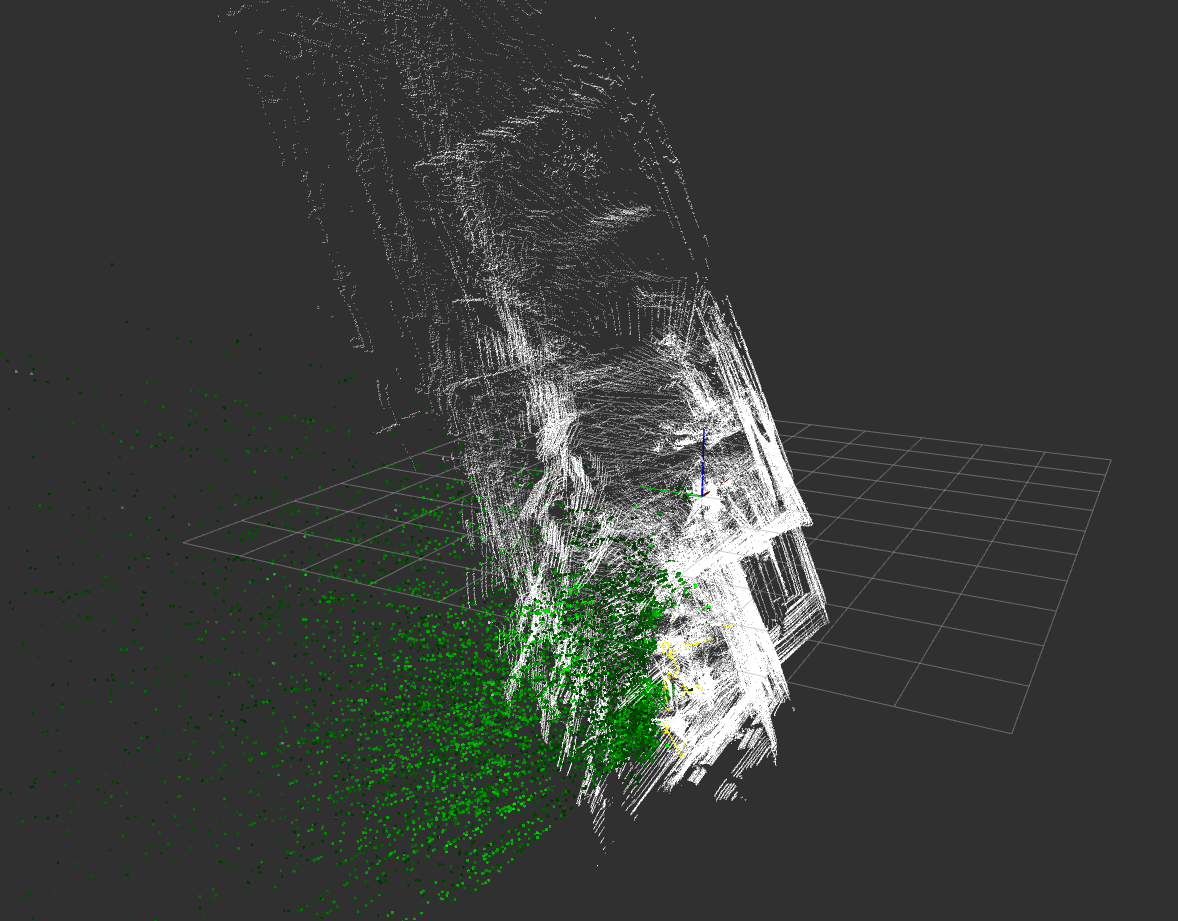
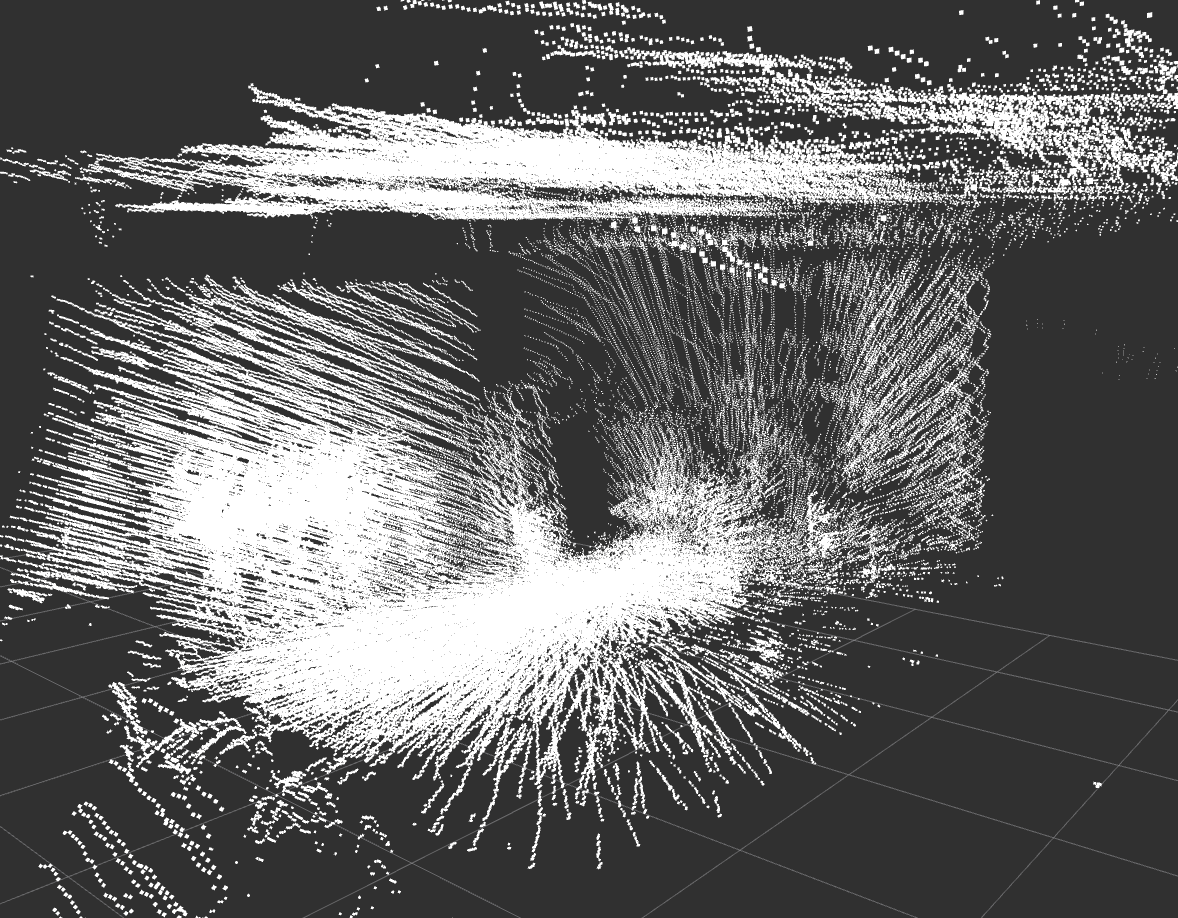
I added the lidar information at the positions caluated by XXX and this picture came out of rviz.

However, this result is pretty far away from the environment generated based on the joint odometry.

It is a different view angle, but i hope, you can get the point
Does anybody have a clue, what i am still doing wrong, or is the hardware of the camera that bad, that the results can't be better.
Thank you in advance.
Christian
[1] ethz-asl/rovio#192
The text was updated successfully, but these errors were encountered: