diff --git a/README.md b/README.md
index 9e7dd01..9367555 100644
--- a/README.md
+++ b/README.md
@@ -4,10 +4,28 @@
# Movement Primitives
+> Dynamical movement primitives (DMPs), probabilistic movement primitives
+> (ProMPs), and spatially coupled bimanual DMPs for imitation learning.
+
Movement primitives are a common group of policy representations in robotics.
There are many types and variations. This repository focuses mainly on
-imitation learning, generalization, and adaptation of movement primitives.
-It provides implementations in Python and Cython.
+imitation learning, generalization, and adaptation of movement primitives for
+Cartesian motions of robots. It provides implementations in Python and Cython
+and can be installed directly from
+[PyPI](https://pypi.org/project/movement-primitives/).
+
+## Content
+
+* [Features](#features)
+* [API Documentation](#api-documentation)
+* [Install Library](#install-library)
+* [Examples](#examples)
+* [Build API Documentation](#build-api-documentation)
+* [Test](#test)
+* [Contributing](#contributing)
+* [Non-public Extensions](#non-public-extensions)
+* [Related Publications](#related-publications)
+* [Funding](#funding)
## Features
@@ -19,14 +37,10 @@ It provides implementations in Python and Cython.
* Propagation of DMP weight distribution to state space distribution
* Probabilistic Movement Primitives (ProMPs)
-Example of dual Cartesian DMP with
-[RH5 Manus](https://robotik.dfki-bremen.de/en/research/robot-systems/rh5-manus/):
-
- -
-Example of joint space DMP with UR5:
+
-
-Example of joint space DMP with UR5:
+ -
+Left: Example of dual Cartesian DMP with [RH5 Manus](https://robotik.dfki-bremen.de/en/research/robot-systems/rh5-manus/).
+Right: Example of joint space DMP with UR5.
## API Documentation
@@ -71,83 +85,12 @@ or install the library with
python setup.py install
```
-## Non-public Extensions
-
-Scripts from the subfolder `examples/external_dependencies/` require access to
-git repositories (URDF files or optional dependencies) and datasets that are
-not publicly available. They are available on request (email
-alexander.fabisch@dfki.de).
-
-Note that the library does not have any non-public dependencies! They are only
-required to run all examples.
-
-### MoCap Library
-
-```bash
-# untested: pip install git+https://git.hb.dfki.de/dfki-interaction/mocap.git
-git clone git@git.hb.dfki.de:dfki-interaction/mocap.git
-cd mocap
-python -m pip install -e .
-cd ..
-```
-
-### Get URDFs
-
-```bash
-# RH5
-git clone git@git.hb.dfki.de:models-robots/rh5_models/pybullet-only-arms-urdf.git --recursive
-# RH5v2
-git clone git@git.hb.dfki.de:models-robots/rh5v2_models/pybullet-urdf.git --recursive
-# Kuka
-git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
-# Solar panel
-git clone git@git.hb.dfki.de:models-objects/solar_panels.git
-# RH5 Gripper
-git clone git@git.hb.dfki.de:motto/abstract-urdf-gripper.git --recursive
-```
-
-### Data
-
-I assume that your data is located in the folder `data/` in most scripts.
-You should put a symlink there to point to your actual data folder.
-
-## Build API Documentation
-
-You can build an API documentation with [pdoc3](https://pdoc3.github.io/pdoc/).
-You can install pdoc3 with
-
-```bash
-pip install pdoc3
-```
-
-... and build the documentation from the main folder with
-
-```bash
-pdoc movement_primitives --html
-```
-
-It will be located at `html/movement_primitives/index.html`.
-
-## Test
-
-To run the tests some python libraries are required:
-
-```bash
-python -m pip install -e .[test]
-```
-
-The tests are located in the folder `test/` and can be executed with:
-`python -m nose test`
-
-This command searches for all files with `test` and executes the functions with `test_*`.
-
-## Contributing
-
-To add new features, documentation, or fix bugs you can open a pull request.
-Directly pushing to the main branch is not allowed.
-
## Examples
+You will find a lot of examples in the subfolder
+[`examples/`](https://github.com/dfki-ric/movement_primitives/tree/main/examples).
+Here are just some highlights to showcase the library.
+
### Conditional ProMPs
-
+Left: Example of dual Cartesian DMP with [RH5 Manus](https://robotik.dfki-bremen.de/en/research/robot-systems/rh5-manus/).
+Right: Example of joint space DMP with UR5.
## API Documentation
@@ -71,83 +85,12 @@ or install the library with
python setup.py install
```
-## Non-public Extensions
-
-Scripts from the subfolder `examples/external_dependencies/` require access to
-git repositories (URDF files or optional dependencies) and datasets that are
-not publicly available. They are available on request (email
-alexander.fabisch@dfki.de).
-
-Note that the library does not have any non-public dependencies! They are only
-required to run all examples.
-
-### MoCap Library
-
-```bash
-# untested: pip install git+https://git.hb.dfki.de/dfki-interaction/mocap.git
-git clone git@git.hb.dfki.de:dfki-interaction/mocap.git
-cd mocap
-python -m pip install -e .
-cd ..
-```
-
-### Get URDFs
-
-```bash
-# RH5
-git clone git@git.hb.dfki.de:models-robots/rh5_models/pybullet-only-arms-urdf.git --recursive
-# RH5v2
-git clone git@git.hb.dfki.de:models-robots/rh5v2_models/pybullet-urdf.git --recursive
-# Kuka
-git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
-# Solar panel
-git clone git@git.hb.dfki.de:models-objects/solar_panels.git
-# RH5 Gripper
-git clone git@git.hb.dfki.de:motto/abstract-urdf-gripper.git --recursive
-```
-
-### Data
-
-I assume that your data is located in the folder `data/` in most scripts.
-You should put a symlink there to point to your actual data folder.
-
-## Build API Documentation
-
-You can build an API documentation with [pdoc3](https://pdoc3.github.io/pdoc/).
-You can install pdoc3 with
-
-```bash
-pip install pdoc3
-```
-
-... and build the documentation from the main folder with
-
-```bash
-pdoc movement_primitives --html
-```
-
-It will be located at `html/movement_primitives/index.html`.
-
-## Test
-
-To run the tests some python libraries are required:
-
-```bash
-python -m pip install -e .[test]
-```
-
-The tests are located in the folder `test/` and can be executed with:
-`python -m nose test`
-
-This command searches for all files with `test` and executes the functions with `test_*`.
-
-## Contributing
-
-To add new features, documentation, or fix bugs you can open a pull request.
-Directly pushing to the main branch is not allowed.
-
## Examples
+You will find a lot of examples in the subfolder
+[`examples/`](https://github.com/dfki-ric/movement_primitives/tree/main/examples).
+Here are just some highlights to showcase the library.
+
### Conditional ProMPs
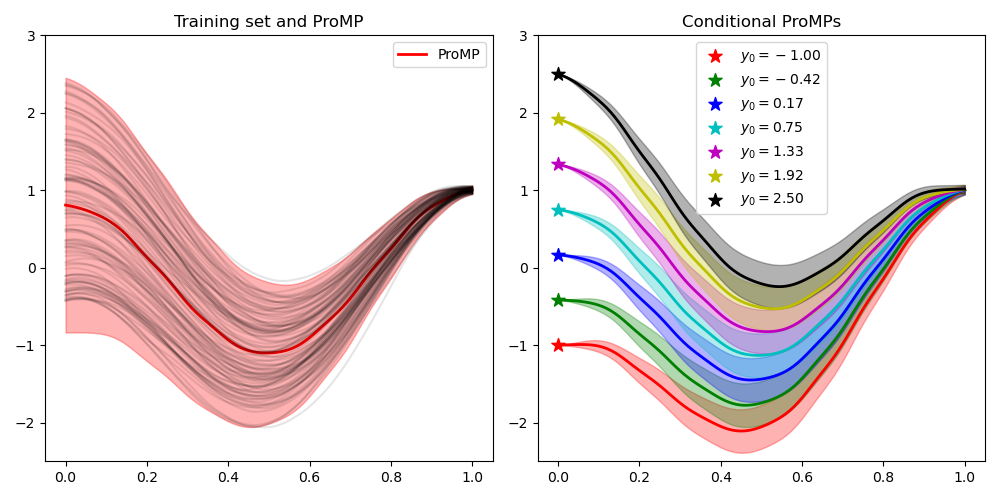 @@ -157,7 +100,7 @@ trajectories that can be conditioned on viapoints. In this example, we
plot the resulting posterior distribution after conditioning on varying
start positions.
-[Script](examples/plot_conditional_promp.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_conditional_promp.py)
### Potential Field of 2D DMP
@@ -167,7 +110,7 @@ A Dynamical Movement Primitive defines a potential field that superimposes
several components: transformation system (goal-directed movement), forcing
term (learned shape), and coupling terms (e.g., obstacle avoidance).
-[Script](examples/plot_dmp_potential_field.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_dmp_potential_field.py)
### DMP with Final Velocity
@@ -177,7 +120,7 @@ Not all DMPs allow a final velocity > 0. In this case we analyze the effect
of changing final velocities in an appropriate variation of the DMP
formulation that allows to set the final velocity.
-[Script](examples/plot_dmp_with_final_velocity.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_dmp_with_final_velocity.py)
### ProMPs
@@ -188,7 +131,7 @@ The LASA Handwriting dataset learned with ProMPs. The dataset consists of
demonstrations and the second and fourth column show the imitated ProMPs
with 1-sigma interval.
-[Script](examples/plot_promp_lasa.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_promp_lasa.py)
### Cartesian DMPs
@@ -197,7 +140,7 @@ with 1-sigma interval.
A trajectory is created manually, imitated with a Cartesian DMP, converted
to a joint trajectory by inverse kinematics, and executed with a UR5.
-[Script](examples/vis_cartesian_dmp.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/vis_cartesian_dmp.py)
### Contextual ProMPs
@@ -209,7 +152,7 @@ kinesthetic teaching. The panel width is considered to be the context over
which we generalize with contextual ProMPs. Each color in the above
visualizations corresponds to a ProMP for a different context.
-[Script](examples/external_dependencies/vis_contextual_promp_distribution.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_contextual_promp_distribution.py)
**Dependencies that are not publicly available:**
@@ -229,7 +172,7 @@ visualizations corresponds to a ProMP for a different context.
We offer specific dual Cartesian DMPs to control dual-arm robotic systems like
humanoid robots.
-Scripts: [Open3D](examples/external_dependencies/vis_solar_panel.py), [PyBullet](examples/external_dependencies/sim_solar_panel.py)
+Scripts: [Open3D](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_solar_panel.py), [PyBullet](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/sim_solar_panel.py)
**Dependencies that are not publicly available:**
@@ -251,7 +194,7 @@ We can introduce a coupling term in a dual Cartesian DMP to constrain the
relative position, orientation, or pose of two end-effectors of a dual-arm
robot.
-Scripts: [Open3D](examples/external_dependencies/vis_cartesian_dual_dmp.py), [PyBullet](examples/external_dependencies/sim_cartesian_dual_dmp.py)
+Scripts: [Open3D](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_cartesian_dual_dmp.py), [PyBullet](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/sim_cartesian_dual_dmp.py)
**Dependencies that are not publicly available:**
@@ -271,7 +214,7 @@ Scripts: [Open3D](examples/external_dependencies/vis_cartesian_dual_dmp.py), [Py
If we have a distribution over DMP parameters, we can propagate them to state
space through an unscented transform.
-[Script](examples/external_dependencies/vis_dmp_to_state_variance.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_dmp_to_state_variance.py)
**Dependencies that are not publicly available:**
@@ -286,6 +229,165 @@ space through an unscented transform.
git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
```
+## Build API Documentation
+
+You can build an API documentation with sphinx.
+You can install all dependencies with
+
+```bash
+python -m pip install movement_primitives[doc]
+```
+
+... and build the documentation from the folder `doc/` with
+
+```bash
+make html
+```
+
+It will be located at `doc/build/html/index.html`.
+
+## Test
+
+To run the tests some python libraries are required:
+
+```bash
+python -m pip install -e .[test]
+```
+
+The tests are located in the folder `test/` and can be executed with:
+`python -m nose test`
+
+This command searches for all files with `test` and executes the functions with `test_*`.
+
+## Contributing
+
+You can report bugs in the [issue tracker](https://github.com/dfki-ric/movement_primitives/issues).
+If you have questions about the software, please use the [discussions
+section](https://github.com/dfki-ric/movement_primitives/discussions).
+To add new features, documentation, or fix bugs you can open a pull request
+on [GitHub](https://github.com/dfki-ric/movement_primitives). Directly pushing
+to the main branch is not allowed.
+
+The recommended workflow to add a new feature, add documentation, or fix a bug
+is the following:
+
+* Push your changes to a branch (e.g., feature/x, doc/y, or fix/z) of your fork
+ of the repository.
+* Open a pull request to the main branch of the main repository.
+
+This is a checklist for new features:
+
+- are there unit tests?
+- does it have docstrings?
+- is it included in the API documentation?
+- run flake8 and pylint
+- should it be part of the readme?
+- should it be included in any example script?
+
+## Non-public Extensions
+
+Scripts from the subfolder `examples/external_dependencies/` require access to
+git repositories (URDF files or optional dependencies) and datasets that are
+not publicly available. They are available on request (email
+alexander.fabisch@dfki.de).
+
+Note that the library does not have any non-public dependencies! They are only
+required to run all examples.
+
+### MoCap Library
+
+```bash
+# untested: pip install git+https://git.hb.dfki.de/dfki-interaction/mocap.git
+git clone git@git.hb.dfki.de:dfki-interaction/mocap.git
+cd mocap
+python -m pip install -e .
+cd ..
+```
+
+### Get URDFs
+
+```bash
+# RH5
+git clone git@git.hb.dfki.de:models-robots/rh5_models/pybullet-only-arms-urdf.git --recursive
+# RH5v2
+git clone git@git.hb.dfki.de:models-robots/rh5v2_models/pybullet-urdf.git --recursive
+# Kuka
+git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
+# Solar panel
+git clone git@git.hb.dfki.de:models-objects/solar_panels.git
+# RH5 Gripper
+git clone git@git.hb.dfki.de:motto/abstract-urdf-gripper.git --recursive
+```
+
+### Data
+
+I assume that your data is located in the folder `data/` in most scripts.
+You should put a symlink there to point to your actual data folder.
+
+## Related Publications
+
+This library implements several types of dynamical movement primitives and
+probabilistic movement primitives. These are described in detail in the
+following papers.
+
+[1] Ijspeert, A. J., Nakanishi, J., Hoffmann, H., Pastor, P., Schaal, S. (2013).
+ Dynamical Movement Primitives: Learning Attractor Models for Motor
+ Behaviors, Neural Computation 25 (2), 328-373. DOI: 10.1162/NECO_a_00393,
+ https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+
+[2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009).
+ Learning and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+
+[3] Muelling, K., Kober, J., Kroemer, O., Peters, J. (2013).
+ Learning to Select and Generalize Striking Movements in Robot Table Tennis.
+ International Journal of Robotics Research 32 (3), 263-279.
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Publications/Muelling_IJRR_2013.pdf
+
+[4] Ude, A., Nemec, B., Petric, T., Murimoto, J. (2014).
+ Orientation in Cartesian space dynamic movement primitives.
+ In IEEE International Conference on Robotics and Automation (ICRA)
+ (pp. 2997-3004). DOI: 10.1109/ICRA.2014.6907291,
+ https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+
+[5] Gams, A., Nemec, B., Zlajpah, L., Wächter, M., Asfour, T., Ude, A. (2013).
+ Modulation of Motor Primitives using Force Feedback: Interaction with
+ the Environment and Bimanual Tasks (2013), In 2013 IEEE/RSJ International
+ Conference on Intelligent Robots and Systems (pp. 5629-5635). DOI:
+ 10.1109/IROS.2013.6697172,
+ https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
+
+[6] Vidakovic, J., Jerbic, B., Sekoranja, B., Svaco, M., Suligoj, F. (2019).
+ Task Dependent Trajectory Learning from Multiple Demonstrations Using
+ Movement Primitives (2019),
+ In International Conference on Robotics in Alpe-Adria Danube Region (RAAD)
+ (pp. 275-282). DOI: 10.1007/978-3-030-19648-6_32,
+ https://link.springer.com/chapter/10.1007/978-3-030-19648-6_32
+
+[7] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2013).
+ Probabilistic movement primitives, In C.J. Burges and L. Bottou and M.
+ Welling and Z. Ghahramani and K.Q. Weinberger (Eds.), Advances in Neural
+ Information Processing Systems, 26,
+ https://papers.nips.cc/paper/2013/file/e53a0a2978c28872a4505bdb51db06dc-Paper.pdf
+
+[8] Maeda, G. J., Neumann, G., Ewerton, M., Lioutikov, R., Kroemer, O.,
+ Peters, J. (2017). Probabilistic movement primitives for coordination of
+ multiple human–robot collaborative tasks. Autonomous Robots, 41, 593-612.
+ DOI: 10.1007/s10514-016-9556-2,
+ https://link.springer.com/article/10.1007/s10514-016-9556-2
+
+[9] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2018).
+ Using probabilistic movement primitives in robotics. Autonomous Robots, 42,
+ 529-551. DOI: 10.1007/s10514-017-9648-7,
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Team/AlexandrosParaschos/promps_auro.pdf
+
+[10] Lazaric, A., Ghavamzadeh, M. (2010).
+ Bayesian Multi-Task Reinforcement Learning. In Proceedings of the 27th
+ International Conference on International Conference on Machine Learning
+ (ICML'10) (pp. 599-606). https://hal.inria.fr/inria-00475214/document
+
## Funding
This library has been developed initially at the
diff --git a/doc/Makefile b/doc/Makefile
new file mode 100644
index 0000000..d0c3cbf
--- /dev/null
+++ b/doc/Makefile
@@ -0,0 +1,20 @@
+# Minimal makefile for Sphinx documentation
+#
+
+# You can set these variables from the command line, and also
+# from the environment for the first two.
+SPHINXOPTS ?=
+SPHINXBUILD ?= sphinx-build
+SOURCEDIR = source
+BUILDDIR = build
+
+# Put it first so that "make" without argument is like "make help".
+help:
+ @$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
+
+.PHONY: help Makefile
+
+# Catch-all target: route all unknown targets to Sphinx using the new
+# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
+%: Makefile
+ @$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
diff --git a/doc/make.bat b/doc/make.bat
new file mode 100644
index 0000000..747ffb7
--- /dev/null
+++ b/doc/make.bat
@@ -0,0 +1,35 @@
+@ECHO OFF
+
+pushd %~dp0
+
+REM Command file for Sphinx documentation
+
+if "%SPHINXBUILD%" == "" (
+ set SPHINXBUILD=sphinx-build
+)
+set SOURCEDIR=source
+set BUILDDIR=build
+
+%SPHINXBUILD% >NUL 2>NUL
+if errorlevel 9009 (
+ echo.
+ echo.The 'sphinx-build' command was not found. Make sure you have Sphinx
+ echo.installed, then set the SPHINXBUILD environment variable to point
+ echo.to the full path of the 'sphinx-build' executable. Alternatively you
+ echo.may add the Sphinx directory to PATH.
+ echo.
+ echo.If you don't have Sphinx installed, grab it from
+ echo.https://www.sphinx-doc.org/
+ exit /b 1
+)
+
+if "%1" == "" goto help
+
+%SPHINXBUILD% -M %1 %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O%
+goto end
+
+:help
+%SPHINXBUILD% -M help %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O%
+
+:end
+popd
diff --git a/doc/source/_templates/class.rst b/doc/source/_templates/class.rst
new file mode 100644
index 0000000..b29757c
--- /dev/null
+++ b/doc/source/_templates/class.rst
@@ -0,0 +1,32 @@
+{{ fullname | escape | underline}}
+
+.. currentmodule:: {{ module }}
+
+.. autoclass:: {{ objname }}
+ :members:
+ :show-inheritance:
+ :inherited-members:
+
+ {% block methods %}
+ .. automethod:: __init__
+
+ {% if methods %}
+ .. rubric:: {{ _('Methods') }}
+
+ .. autosummary::
+ {% for item in methods %}
+ ~{{ name }}.{{ item }}
+ {%- endfor %}
+ {% endif %}
+ {% endblock %}
+
+ {% block attributes %}
+ {% if attributes %}
+ .. rubric:: {{ _('Attributes') }}
+
+ .. autosummary::
+ {% for item in attributes %}
+ ~{{ name }}.{{ item }}
+ {%- endfor %}
+ {% endif %}
+ {% endblock %}
diff --git a/doc/source/api.rst b/doc/source/api.rst
new file mode 100644
index 0000000..2bf4443
--- /dev/null
+++ b/doc/source/api.rst
@@ -0,0 +1,160 @@
+.. _api:
+
+=================
+API Documentation
+=================
+
+This is the detailed documentation of all public classes and functions.
+You can also search for specific modules, classes, or functions in the
+:ref:`genindex`.
+
+.. contents:: :local:
+ :depth: 1
+
+
+:mod:`movement_primitives.dmp`
+==============================
+
+.. automodule:: movement_primitives.dmp
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.dmp.DMP
+ ~movement_primitives.dmp.DMPWithFinalVelocity
+ ~movement_primitives.dmp.CartesianDMP
+ ~movement_primitives.dmp.DualCartesianDMP
+ ~movement_primitives.dmp.DMPBase
+ ~movement_primitives.dmp.WeightParametersMixin
+ ~movement_primitives.dmp.CouplingTermPos1DToPos1D
+ ~movement_primitives.dmp.CouplingTermObstacleAvoidance2D
+ ~movement_primitives.dmp.CouplingTermObstacleAvoidance3D
+ ~movement_primitives.dmp.CouplingTermPos3DToPos3D
+ ~movement_primitives.dmp.CouplingTermDualCartesianPose
+ ~movement_primitives.dmp.CouplingTermObstacleAvoidance3D
+ ~movement_primitives.dmp.CouplingTermDualCartesianDistance
+ ~movement_primitives.dmp.CouplingTermDualCartesianTrajectory
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.dmp.dmp_transformation_system
+ ~movement_primitives.dmp.canonical_system_alpha
+ ~movement_primitives.dmp.phase
+ ~movement_primitives.dmp.obstacle_avoidance_acceleration_2d
+ ~movement_primitives.dmp.obstacle_avoidance_acceleration_3d
+
+
+:mod:`movement_primitives.promp`
+================================
+
+.. automodule:: movement_primitives.promp
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.promp.ProMP
+
+
+:mod:`movement_primitives.io`
+=============================
+
+.. automodule:: movement_primitives.io
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.io.write_pickle
+ ~movement_primitives.io.read_pickle
+ ~movement_primitives.io.write_yaml
+ ~movement_primitives.io.read_yaml
+ ~movement_primitives.io.write_json
+ ~movement_primitives.io.read_json
+
+
+:mod:`movement_primitives.base`
+===============================
+
+.. automodule:: movement_primitives.base
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.base.PointToPointMovement
+
+
+:mod:`movement_primitives.data`
+===============================
+
+.. automodule:: movement_primitives.data
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.data.load_lasa
+ ~movement_primitives.data.generate_minimum_jerk
+ ~movement_primitives.data.generate_1d_trajectory_distribution
+
+
+:mod:`movement_primitives.kinematics`
+=====================================
+
+.. automodule:: movement_primitives.kinematics
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.kinematics.Kinematics
+ ~movement_primitives.kinematics.Chain
+
+
+:mod:`movement_primitives.plot`
+===============================
+
+.. automodule:: movement_primitives.plot
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.plot.plot_trajectory_in_rows
+ ~movement_primitives.plot.plot_distribution_in_rows
+
+
+:mod:`movement_primitives.visualization`
+========================================
+
+.. automodule:: movement_primitives.visualization
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.visualization.plot_pointcloud
+ ~movement_primitives.visualization.to_ellipsoid
+
+
+:mod:`movement_primitives.dmp_potential_field`
+==============================================
+
+.. automodule:: movement_primitives.dmp_potential_field
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.dmp_potential_field.plot_potential_field_2d
+
+
+:mod:`movement_primitives.spring_damper`
+========================================
+
+.. automodule:: movement_primitives.spring_damper
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.spring_damper.SpringDamper
+ ~movement_primitives.spring_damper.SpringDamperOrientation
diff --git a/doc/source/conf.py b/doc/source/conf.py
new file mode 100644
index 0000000..8d7930d
--- /dev/null
+++ b/doc/source/conf.py
@@ -0,0 +1,93 @@
+# Configuration file for the Sphinx documentation builder.
+#
+# This file only contains a selection of the most common options. For a full
+# list see the documentation:
+# https://www.sphinx-doc.org/en/master/usage/configuration.html
+
+# -- Path setup --------------------------------------------------------------
+
+# If extensions (or modules to document with autodoc) are in another directory,
+# add these directories to sys.path here. If the directory is relative to the
+# documentation root, use os.path.abspath to make it absolute, like shown here.
+#
+import os
+import sys
+import time
+import sphinx_bootstrap_theme
+
+
+sys.path.insert(0, os.path.abspath('.'))
+sys.path.insert(0, os.path.abspath('../..'))
+
+
+# -- Project information -----------------------------------------------------
+
+project = "movement_primitives"
+copyright = "2020-{}, Alexander Fabisch, DFKI GmbH, Robotics Innovation Center".format(time.strftime("%Y"))
+author = "Alexander Fabisch"
+
+# The full version, including alpha/beta/rc tags
+release = __import__(project).__version__
+
+
+# -- General configuration ---------------------------------------------------
+
+# Add any Sphinx extension module names here, as strings. They can be
+# extensions coming with Sphinx (named 'sphinx.ext.*') or your custom
+# ones.
+extensions = [
+ "numpydoc",
+ "myst_parser",
+ "sphinx.ext.autodoc",
+ "sphinx.ext.autosummary"
+]
+
+# Add any paths that contain templates here, relative to this directory.
+templates_path = ['_templates']
+
+# List of patterns, relative to source directory, that match files and
+# directories to ignore when looking for source files.
+# This pattern also affects html_static_path and html_extra_path.
+exclude_patterns = []
+
+autosummary_generate = True
+
+
+# -- Options for HTML output -------------------------------------------------
+
+# The theme to use for HTML and HTML Help pages. See the documentation for
+# a list of builtin themes.
+#
+html_theme = "bootstrap"
+html_theme_path = sphinx_bootstrap_theme.get_html_theme_path()
+html_theme_options = {
+ "bootswatch_theme": "readable",
+ "navbar_sidebarrel": False,
+ "bootstrap_version": "3",
+ "nosidebar": True,
+ "body_max_width": "90%",
+ "navbar_links": [
+ ("Home", "index"),
+ ("API", "api"),
+ ],
+}
+
+root_doc = "index"
+source_suffix = {
+ ".rst": "restructuredtext",
+ ".md": "markdown",
+}
+
+# Add any paths that contain custom static files (such as style sheets) here,
+# relative to this directory. They are copied after the builtin static files,
+# so a file named "default.css" will overwrite the builtin "default.css".
+html_static_path = ["_static"]
+html_show_sourcelink = False
+html_show_sphinx = False
+
+intersphinx_mapping = {
+ 'python': ('https://docs.python.org/{.major}'.format(sys.version_info), None),
+ 'numpy': ('https://numpy.org/doc/stable', None),
+ 'scipy': ('https://docs.scipy.org/doc/scipy/reference', None),
+ 'matplotlib': ('https://matplotlib.org/', None)
+}
diff --git a/doc/source/index.md b/doc/source/index.md
new file mode 120000
index 0000000..fe84005
--- /dev/null
+++ b/doc/source/index.md
@@ -0,0 +1 @@
+../../README.md
\ No newline at end of file
diff --git a/movement_primitives/base.py b/movement_primitives/base.py
index ec3070e..17c4e73 100644
--- a/movement_primitives/base.py
+++ b/movement_primitives/base.py
@@ -1,4 +1,7 @@
-"""Base classes of movement primitives."""
+"""Base Classes
+============
+
+Base classes of movement primitives."""
import abc
import numpy as np
@@ -13,6 +16,44 @@ class PointToPointMovement(abc.ABC):
n_vel_dims : int
Number of dimensions of the velocity that will be controlled.
+
+ Attributes
+ ----------
+ n_dims : int
+ Number of state space dimensions.
+
+ n_vel_dims : int
+ Number of velocity dimensions.
+
+ t : float
+ Current time.
+
+ last_t : float
+ Time during last step.
+
+ start_y : array, shape (n_dims,)
+ Initial state.
+
+ start_yd : array, shape (n_vel_dims,)
+ Initial velocity.
+
+ start_ydd : array, shape (n_vel_dims,)
+ Initial acceleration.
+
+ goal_y : array, shape (n_dims,)
+ Goal state.
+
+ goal_yd : array, shape (n_vel_dims,)
+ Goal velocity.
+
+ goal_ydd : array, shape (n_vel_dims,)
+ Goal acceleration.
+
+ current_y : array, shape (n_dims,)
+ Current state.
+
+ current_yd : array, shape (n_vel_dims,)
+ Current velocity.
"""
def __init__(self, n_pos_dims, n_vel_dims):
self.n_dims = n_pos_dims
@@ -40,25 +81,25 @@ def configure(
Parameters
----------
t : float, optional
- Time at current step
+ Time at current step.
start_y : array, shape (n_dims,)
- Initial state
+ Initial state.
start_yd : array, shape (n_vel_dims,)
- Initial velocity
+ Initial velocity.
start_ydd : array, shape (n_vel_dims,)
- Initial acceleration
+ Initial acceleration.
goal_y : array, shape (n_dims,)
- Goal state
+ Goal state.
goal_yd : array, shape (n_vel_dims,)
- Goal velocity
+ Goal velocity.
goal_ydd : array, shape (n_vel_dims,)
- Goal acceleration
+ Goal acceleration.
"""
if t is not None:
self.t = t
diff --git a/movement_primitives/data/__init__.py b/movement_primitives/data/__init__.py
index 6d84bdb..ffcc7f2 100644
--- a/movement_primitives/data/__init__.py
+++ b/movement_primitives/data/__init__.py
@@ -1,4 +1,8 @@
-"""Tools for loading datasets."""
+"""Data
+====
+
+Tools for loading datasets.
+"""
from ._lasa import load_lasa
from ._minimum_jerk import generate_minimum_jerk
from ._toy_1d import generate_1d_trajectory_distribution
diff --git a/movement_primitives/dmp/__init__.py b/movement_primitives/dmp/__init__.py
index 2d7a3d7..12c58bd 100644
--- a/movement_primitives/dmp/__init__.py
+++ b/movement_primitives/dmp/__init__.py
@@ -1,4 +1,25 @@
-"""Dynamical movement primitive variants."""
+r"""Dynamical Movement Primitive (DMP)
+==================================
+
+This module provides implementations of various DMP types. DMPs consist of
+a goal-directed movement generated by the transformation system and a forcing
+term that defines the shape of the trajectory. They are time-dependent and
+usually converge to the goal after a constant execution time.
+
+Every implementation is slightly different, but we use a similar notation for
+all of them:
+
+* :math:`y,\dot{y},\ddot{y}` - position, velocity, and acceleration; these
+ might be translation components only, orientation, or both
+* :math:`y_0` - start position
+* :math:`g` - goal of the movement (attractor of the DMP)
+* :math:`\tau` - execution time
+* :math:`z` - phase variable, starts at 1 and converges to 0
+* :math:`f(z)` - forcing term, learned component that defines the shape of the
+ movement
+* :math:`C_t` - coupling term that is added to the acceleration of the DMP
+"""
+from ._base import DMPBase, WeightParametersMixin
from ._dmp import DMP, dmp_transformation_system
from ._dmp_with_final_velocity import DMPWithFinalVelocity
from ._cartesian_dmp import CartesianDMP
@@ -14,6 +35,7 @@
__all__ = [
+ "DMPBase", "WeightParametersMixin",
"DMP", "dmp_transformation_system", "DMPWithFinalVelocity", "CartesianDMP",
"DualCartesianDMP", "CouplingTermPos1DToPos1D",
"CouplingTermObstacleAvoidance2D", "CouplingTermObstacleAvoidance3D",
diff --git a/movement_primitives/dmp/_base.py b/movement_primitives/dmp/_base.py
index a9eed67..da883af 100644
--- a/movement_primitives/dmp/_base.py
+++ b/movement_primitives/dmp/_base.py
@@ -3,7 +3,16 @@
class DMPBase(PointToPointMovement):
- """Base class of Dynamical Movement Primitives (DMPs)."""
+ """Base class of Dynamical Movement Primitives (DMPs).
+
+ Parameters
+ ----------
+ n_pos_dims : int
+ Number of dimensions of the position that will be controlled.
+
+ n_vel_dims : int
+ Number of dimensions of the velocity that will be controlled.
+ """
def __init__(self, n_pos_dims, n_vel_dims):
super(DMPBase, self).__init__(n_pos_dims, n_vel_dims)
@@ -18,7 +27,12 @@ def reset(self):
class WeightParametersMixin:
- """Mixin class providing common access methods to forcing term weights."""
+ """Mixin class providing common access methods to forcing term weights.
+
+ This can be used, for instance, for black-box optimization of the weights
+ with respect to some cost / objective function in a reinforcement learning
+ setting.
+ """
def get_weights(self):
"""Get weight vector of DMP.
diff --git a/movement_primitives/dmp/_cartesian_dmp.py b/movement_primitives/dmp/_cartesian_dmp.py
index 701badf..20dd73f 100644
--- a/movement_primitives/dmp/_cartesian_dmp.py
+++ b/movement_primitives/dmp/_cartesian_dmp.py
@@ -151,29 +151,35 @@ def dmp_step_quaternion_python(
class CartesianDMP(DMPBase):
- """Cartesian dynamical movement primitive.
+ r"""Cartesian dynamical movement primitive.
The Cartesian DMP handles orientation and position separately. The
- orientation is represented by a quaternion. The quaternion DMP is
- implemented according to
+ orientation is represented by a quaternion.
- A. Ude, B. Nemec, T. Petric, J. Murimoto:
- Orientation in Cartesian space dynamic movement primitives (2014),
- IEEE International Conference on Robotics and Automation (ICRA),
- pp. 2997-3004, doi: 10.1109/ICRA.2014.6907291,
- https://ieeexplore.ieee.org/document/6907291,
- https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+ While the dimension of the state space is 7, the dimension of the
+ velocity, acceleration, and forcing term is 6.
- (if smooth scaling is activated) with modification of scaling proposed by
+ Equation of transformation system for the orientation (according to [1]_,
+ Eq. 16):
- P. Pastor, H. Hoffmann, T. Asfour, S. Schaal:
- Learning and Generalization of Motor Skills by Learning from Demonstration,
- 2009 IEEE International Conference on Robotics and Automation,
- Kobe, Japan, 2009, pp. 763-768, doi: 10.1109/ROBOT.2009.5152385,
- https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+ .. math::
- While the dimension of the state space is 7, the dimension of the
- velocity, acceleration, and forcing term is 6.
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y}) + f(z) + C_t) / \tau^2
+
+ Note that in this case :math:`y` is a quaternion in this case,
+ :math:`g - y` the quaternion difference (expressed as rotation vector),
+ :math:`\dot{y}` is the angular velocity, and :math:`\ddot{y}` the
+ angular acceleration.
+
+ With smooth scaling (according to [2]_):
+
+ .. math::
+
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y}
+ - \underline{\beta_y (g - y_0) z}) + f(z) + C_t) / \tau^2
+
+ The position is handled in the same way, just like in the original
+ :class:`DMP`.
Parameters
----------
@@ -202,6 +208,20 @@ class CartesianDMP(DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Ude, A., Nemec, B., Petric, T., Murimoto, J. (2014).
+ Orientation in Cartesian space dynamic movement primitives.
+ In IEEE International Conference on Robotics and Automation (ICRA)
+ (pp. 2997-3004). DOI: 10.1109/ICRA.2014.6907291,
+ https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+
+ .. [2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009). Learning
+ and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
"""
def __init__(
self, execution_time=1.0, dt=0.01, n_weights_per_dim=10,
diff --git a/movement_primitives/dmp/_coupling_terms.py b/movement_primitives/dmp/_coupling_terms.py
index 1dd4d40..cdf5085 100644
--- a/movement_primitives/dmp/_coupling_terms.py
+++ b/movement_primitives/dmp/_coupling_terms.py
@@ -65,8 +65,25 @@ def obstacle_avoidance_acceleration_2d(
return np.squeeze(cdd)
-class CouplingTermObstacleAvoidance2D: # for DMP
- """Coupling term for obstacle avoidance in 2D."""
+class CouplingTermObstacleAvoidance2D:
+ """Coupling term for obstacle avoidance in 2D.
+
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
+
+ This is the simplified 2D implementation of
+ :class:`CouplingTermObstacleAvoidance3D`.
+
+ Parameters
+ ----------
+ obstacle_position : array, shape (2,)
+ Position of the point obstacle.
+
+ gamma : float, optional (default: 1000)
+ Parameter of obstacle avoidance.
+
+ beta : float, optional (default: 20 / pi)
+ Parameter of obstacle avoidance.
+ """
def __init__(self, obstacle_position, gamma=1000.0, beta=20.0 / math.pi,
fast=False):
self.obstacle_position = obstacle_position
@@ -78,19 +95,101 @@ def __init__(self, obstacle_position, gamma=1000.0, beta=20.0 / math.pi,
self.step_function = obstacle_avoidance_acceleration_2d
def coupling(self, y, yd):
+ """Computes coupling term based on current state.
+
+ Parameters
+ ----------
+ y : array, shape (n_dims,)
+ Current position.
+
+ yd : array, shape (n_dims,)
+ Current velocity.
+
+ Returns
+ -------
+ cd : array, shape (n_dims,)
+ Velocity. 0 for this coupling term.
+
+ cdd : array, shape (n_dims,)
+ Acceleration.
+ """
cdd = self.step_function(
y, yd, self.obstacle_position, self.gamma, self.beta)
return np.zeros_like(cdd), cdd
class CouplingTermObstacleAvoidance3D: # for DMP
- """Coupling term for obstacle avoidance in 3D."""
+ r"""Coupling term for obstacle avoidance in 3D.
+
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
+
+ Following [1]_, this coupling term adds an acceleration
+
+ .. math::
+
+ \boldsymbol{C}_t = \gamma \boldsymbol{R} \dot{\boldsymbol{y}}
+ \theta \exp(-\beta \theta),
+
+ where
+
+ .. math::
+
+ \theta = \arccos\left( \frac{(\boldsymbol{o} - \boldsymbol{y})^T
+ \dot{\boldsymbol{y}}}{|\boldsymbol{o} - \boldsymbol{y}|
+ |\dot{\boldsymbol{y}}|} \right)
+
+ and a rotation axis :math:`\boldsymbol{r} =
+ (\boldsymbol{o} - \boldsymbol{y}) \times \dot{\boldsymbol{y}}` used to
+ compute the rotation matrix :math:`\boldsymbol{R}` that rotates about it
+ by 90 degrees for an obstacle at position :math:`\boldsymbol{o}`.
+
+ Intuitively, this coupling term adds a movement perpendicular to the
+ current velocity in the plane defined by the direction to the obstacle and
+ the current movement direction.
+
+ Parameters
+ ----------
+ obstacle_position : array, shape (3,)
+ Position of the point obstacle.
+
+ gamma : float, optional (default: 1000)
+ Parameter of obstacle avoidance.
+
+ beta : float, optional (default: 20 / pi)
+ Parameter of obstacle avoidance.
+
+ References
+ ----------
+ .. [1] Ijspeert, A. J., Nakanishi, J., Hoffmann, H., Pastor, P., Schaal, S.
+ (2013). Dynamical Movement Primitives: Learning Attractor Models for
+ Motor Behaviors. Neural Computation 25 (2), 328-373. DOI:
+ 10.1162/NECO_a_00393,
+ https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+ """
def __init__(self, obstacle_position, gamma=1000.0, beta=20.0 / math.pi):
self.obstacle_position = obstacle_position
self.gamma = gamma
self.beta = beta
def coupling(self, y, yd):
+ """Computes coupling term based on current state.
+
+ Parameters
+ ----------
+ y : array, shape (n_dims,)
+ Current position.
+
+ yd : array, shape (n_dims,)
+ Current velocity.
+
+ Returns
+ -------
+ cd : array, shape (n_dims,)
+ Velocity. 0 for this coupling term.
+
+ cdd : array, shape (n_dims,)
+ Acceleration.
+ """
cdd = obstacle_avoidance_acceleration_3d(
y, yd, self.obstacle_position, self.gamma, self.beta)
return np.zeros_like(cdd), cdd
@@ -135,10 +234,7 @@ def obstacle_avoidance_acceleration_3d(
class CouplingTermPos1DToPos1D:
"""Couples position components of a 2D DMP with a virtual spring.
- A. Gams, B. Nemec, L. Zlajpah, M. Wächter, T. Asfour, A. Ude:
- Modulation of Motor Primitives using Force Feedback: Interaction with
- the Environment and Bimanual Tasks (2013), IROS,
- https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
Parameters
----------
@@ -164,6 +260,15 @@ class CouplingTermPos1DToPos1D:
c2 : float, optional (default: 30)
Scaling factor for spring forces in the acceleration component.
+
+ References
+ ----------
+ .. [1] Gams, A., Nemec, B., Zlajpah, L., Wächter, M., Asfour, T., Ude, A.
+ (2013). Modulation of Motor Primitives using Force Feedback: Interaction
+ with the Environment and Bimanual Tasks (2013), In 2013 IEEE/RSJ
+ International Conference on Intelligent Robots and Systems (pp.
+ 5629-5635). DOI: 10.1109/IROS.2013.6697172,
+ https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
"""
def __init__(self, desired_distance, lf, k=1.0, c1=100.0, c2=30.0):
self.desired_distance = desired_distance
@@ -183,13 +288,10 @@ def coupling(self, y, yd=None):
return np.array([C12, C21]), np.array([C12dot, C21dot])
-class CouplingTermPos3DToPos3D: # for DMP
+class CouplingTermPos3DToPos3D:
"""Couples position components of a 6D DMP with a virtual spring in 3D.
- A. Gams, B. Nemec, L. Zlajpah, M. Wächter, T. Asfour, A. Ude:
- Modulation of Motor Primitives using Force Feedback: Interaction with
- the Environment and Bimanual Tasks (2013), IROS,
- https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
Parameters
----------
@@ -215,6 +317,15 @@ class CouplingTermPos3DToPos3D: # for DMP
c2 : float, optional (default: 30)
Scaling factor for spring forces in the acceleration component.
+
+ References
+ ----------
+ .. [1] Gams, A., Nemec, B., Zlajpah, L., Wächter, M., Asfour, T., Ude, A.
+ (2013). Modulation of Motor Primitives using Force Feedback: Interaction
+ with the Environment and Bimanual Tasks (2013), In 2013 IEEE/RSJ
+ International Conference on Intelligent Robots and Systems (pp.
+ 5629-5635). DOI: 10.1109/IROS.2013.6697172,
+ https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
"""
def __init__(self, desired_distance, lf, k=1.0, c1=1.0, c2=30.0):
self.desired_distance = desired_distance
@@ -237,8 +348,36 @@ def coupling(self, y, yd=None):
return np.hstack([C12, C21]), np.hstack([C12dot, C21dot])
-class CouplingTermDualCartesianDistance: # for DualCartesianDMP
- """Couples distance between 3D positions of a dual Cartesian DMP."""
+class CouplingTermDualCartesianDistance:
+ """Couples distance between 3D positions of a dual Cartesian DMP.
+
+ For :class:`DualCartesianDMP`.
+
+ Parameters
+ ----------
+ desired_distance : float
+ Desired distance between components.
+
+ lf : array-like, shape (2,)
+ Binary values that indicate which DMP(s) will be adapted.
+ The variable lf defines the relation leader-follower. If lf[0] = lf[1],
+ then both robots will adapt their trajectories to follow average
+ trajectories at the defined distance dd between them [..]. On the other
+ hand, if lf[0] = 0 and lf[1] = 1, only DMP1 will change the trajectory
+ to match the trajectory of DMP0, again at the distance dd and again
+ only after learning. Vice versa applies as well. Leader-follower
+ relation can be determined by a higher-level planner [..].
+
+ k : float, optional (default: 1)
+ Virtual spring constant that couples the positions.
+
+ c1 : float, optional (default: 100)
+ Scaling factor for spring forces in the velocity component and
+ acceleration component.
+
+ c2 : float, optional (default: 30)
+ Scaling factor for spring forces in the acceleration component.
+ """
def __init__(self, desired_distance, lf, k=1.0, c1=1.0, c2=30.0):
self.desired_distance = desired_distance
self.lf = lf
@@ -260,8 +399,42 @@ def coupling(self, y, yd=None):
np.hstack([C12dot, np.zeros(3), C21dot, np.zeros(3)]))
-class CouplingTermDualCartesianPose: # for DualCartesianDMP
- """Couples relative poses of dual Cartesian DMP."""
+class CouplingTermDualCartesianPose:
+ """Couples relative poses of dual Cartesian DMP.
+
+ For :class:`DualCartesianDMP`.
+
+ Parameters
+ ----------
+ desired_distance : array, shape (4, 4)
+ Desired distance between components.
+
+ lf : array-like, shape (2,)
+ Binary values that indicate which DMP(s) will be adapted.
+ The variable lf defines the relation leader-follower. If lf[0] = lf[1],
+ then both robots will adapt their trajectories to follow average
+ trajectories at the defined distance dd between them [..]. On the other
+ hand, if lf[0] = 0 and lf[1] = 1, only DMP1 will change the trajectory
+ to match the trajectory of DMP0, again at the distance dd and again
+ only after learning. Vice versa applies as well. Leader-follower
+ relation can be determined by a higher-level planner [..].
+
+ couple_position : bool, optional (default: True)
+ Couple position between components.
+
+ couple_orientation : bool, optional (default: True)
+ Couple orientation between components.
+
+ k : float, optional (default: 1)
+ Virtual spring constant that couples the positions.
+
+ c1 : float, optional (default: 100)
+ Scaling factor for spring forces in the velocity component and
+ acceleration component.
+
+ c2 : float, optional (default: 30)
+ Scaling factor for spring forces in the acceleration component.
+ """
def __init__(self, desired_distance, lf, couple_position=True,
couple_orientation=True, k=1.0, c1=1.0, c2=30.0, verbose=0):
self.desired_distance = desired_distance
@@ -352,8 +525,43 @@ def _right2left_pq(self, y):
return right2left_pq
-class CouplingTermDualCartesianTrajectory(CouplingTermDualCartesianPose): # for DualCartesianDMP
- """Couples relative pose in dual Cartesian DMP with a given trajectory."""
+class CouplingTermDualCartesianTrajectory(CouplingTermDualCartesianPose):
+ """Couples relative pose in dual Cartesian DMP with a given trajectory.
+
+ For :class:`DualCartesianDMP`.
+
+ Parameters
+ ----------
+ offset : array, shape (7,)
+ Offset for desired distance between components as position and
+ quaternion.
+
+ lf : array-like, shape (2,)
+ Binary values that indicate which DMP(s) will be adapted.
+ The variable lf defines the relation leader-follower. If lf[0] = lf[1],
+ then both robots will adapt their trajectories to follow average
+ trajectories at the defined distance dd between them [..]. On the other
+ hand, if lf[0] = 0 and lf[1] = 1, only DMP1 will change the trajectory
+ to match the trajectory of DMP0, again at the distance dd and again
+ only after learning. Vice versa applies as well. Leader-follower
+ relation can be determined by a higher-level planner [..].
+
+ couple_position : bool, optional (default: True)
+ Couple position between components.
+
+ couple_orientation : bool, optional (default: True)
+ Couple orientation between components.
+
+ k : float, optional (default: 1)
+ Virtual spring constant that couples the positions.
+
+ c1 : float, optional (default: 100)
+ Scaling factor for spring forces in the velocity component and
+ acceleration component.
+
+ c2 : float, optional (default: 30)
+ Scaling factor for spring forces in the acceleration component.
+ """
def __init__(self, offset, lf, dt, couple_position=True,
couple_orientation=True, k=1.0, c1=1.0, c2=30.0, verbose=1):
self.offset = offset
diff --git a/movement_primitives/dmp/_dmp.py b/movement_primitives/dmp/_dmp.py
index 22697ea..3288d3a 100644
--- a/movement_primitives/dmp/_dmp.py
+++ b/movement_primitives/dmp/_dmp.py
@@ -340,23 +340,19 @@ def dmp_step_euler(
class DMP(WeightParametersMixin, DMPBase):
- """Dynamical movement primitive (DMP).
+ r"""Dynamical movement primitive (DMP).
- Implementation according to
+ Equation of transformation system (according to [1]_, Eq. 2.1):
- A.J. Ijspeert, J. Nakanishi, H. Hoffmann, P. Pastor, S. Schaal:
- Dynamical Movement Primitives: Learning Attractor Models for Motor
- Behaviors (2013), Neural Computation 25(2), pp. 328-373, doi:
- 10.1162/NECO_a_00393, https://ieeexplore.ieee.org/document/6797340,
- https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+ .. math::
- (if smooth scaling is activated) with modification of scaling proposed by
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y}) + f(z) + C_t) / \tau^2
- P. Pastor, H. Hoffmann, T. Asfour, S. Schaal:
- Learning and Generalization of Motor Skills by Learning from Demonstration,
- 2009 IEEE International Conference on Robotics and Automation,
- Kobe, Japan, 2009, pp. 763-768, doi: 10.1109/ROBOT.2009.5152385,
- https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+ and if smooth scaling is activated (according to [2]_):
+
+ .. math::
+
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y} - \underline{\beta_y (g - y_0) z}) + f(z) + C_t) / \tau^2
Parameters
----------
@@ -364,16 +360,16 @@ class DMP(WeightParametersMixin, DMPBase):
State space dimensions.
execution_time : float, optional (default: 1)
- Execution time of the DMP.
+ Execution time of the DMP: :math:`\tau`.
dt : float, optional (default: 0.01)
- Time difference between DMP steps.
+ Time difference between DMP steps: :math:`\Delta t`.
n_weights_per_dim : int, optional (default: 10)
Number of weights of the function approximator per dimension.
int_dt : float, optional (default: 0.001)
- Time difference for Euler integration.
+ Time difference for Euler integration of transformation system.
p_gain : float, optional (default: 0)
Gain for proportional controller of DMP tracking error.
@@ -392,6 +388,20 @@ class DMP(WeightParametersMixin, DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Ijspeert, A. J., Nakanishi, J., Hoffmann, H., Pastor, P., Schaal, S.
+ (2013). Dynamical Movement Primitives: Learning Attractor Models for
+ Motor Behaviors. Neural Computation 25 (2), 328-373. DOI:
+ 10.1162/NECO_a_00393,
+ https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+
+ .. [2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009). Learning
+ and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
"""
def __init__(self, n_dims, execution_time=1.0, dt=0.01,
n_weights_per_dim=10, int_dt=0.001, p_gain=0.0,
diff --git a/movement_primitives/dmp/_dmp_with_final_velocity.py b/movement_primitives/dmp/_dmp_with_final_velocity.py
index 3803188..b7f34d0 100644
--- a/movement_primitives/dmp/_dmp_with_final_velocity.py
+++ b/movement_primitives/dmp/_dmp_with_final_velocity.py
@@ -6,14 +6,13 @@
class DMPWithFinalVelocity(WeightParametersMixin, DMPBase):
- """Dynamical movement primitive (DMP) with final velocity.
+ r"""Dynamical movement primitive (DMP) with final velocity.
- Implementation according to
+ Equation of transformation system (according to [1]_, Eq. 6):
- K. Muelling, J. Kober, O. Kroemer, J. Peters:
- Learning to Select and Generalize Striking Movements in Robot Table Tennis
- (2013), International Journal of Robotics Research 32(3), pp. 263-279,
- https://www.ias.informatik.tu-darmstadt.de/uploads/Publications/Muelling_IJRR_2013.pdf
+ .. math::
+
+ \ddot{y} = (\alpha_y (\beta_y (g - y) + \tau\dot{g} - \tau \dot{y}) + f(z))/\tau^2
Parameters
----------
@@ -21,10 +20,10 @@ class DMPWithFinalVelocity(WeightParametersMixin, DMPBase):
State space dimensions.
execution_time : float, optional (default: 1)
- Execution time of the DMP.
+ Execution time of the DMP: :math:`\tau`.
dt : float, optional (default: 0.01)
- Time difference between DMP steps.
+ Time difference between DMP steps: :math:`\Delta t`.
n_weights_per_dim : int, optional (default: 10)
Number of weights of the function approximator per dimension.
@@ -44,6 +43,13 @@ class DMPWithFinalVelocity(WeightParametersMixin, DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Muelling, K., Kober, J., Kroemer, O., Peters, J. (2013). Learning to
+ Select and Generalize Striking Movements in Robot Table Tennis.
+ International Journal of Robotics Research 32 (3), 263-279.
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Publications/Muelling_IJRR_2013.pdf
"""
def __init__(self, n_dims, execution_time=1.0, dt=0.01,
n_weights_per_dim=10, int_dt=0.001, p_gain=0.0):
diff --git a/movement_primitives/dmp/_dual_cartesian_dmp.py b/movement_primitives/dmp/_dual_cartesian_dmp.py
index 8089839..b948718 100644
--- a/movement_primitives/dmp/_dual_cartesian_dmp.py
+++ b/movement_primitives/dmp/_dual_cartesian_dmp.py
@@ -174,22 +174,9 @@ class DualCartesianDMP(WeightParametersMixin, DMPBase):
"""Dual cartesian dynamical movement primitive.
Each of the two Cartesian DMPs handles orientation and position separately.
- The orientation is represented by a quaternion. The quaternion DMP is
- implemented according to
-
- A. Ude, B. Nemec, T. Petric, J. Murimoto:
- Orientation in Cartesian space dynamic movement primitives (2014),
- IEEE International Conference on Robotics and Automation (ICRA),
- pp. 2997-3004, doi: 10.1109/ICRA.2014.6907291,
- https://ieeexplore.ieee.org/document/6907291
-
- (if smooth scaling is activated) with modification of scaling proposed by
-
- P. Pastor, H. Hoffmann, T. Asfour, S. Schaal:
- Learning and Generalization of Motor Skills by Learning from Demonstration,
- 2009 IEEE International Conference on Robotics and Automation,
- Kobe, Japan, 2009, pp. 763-768, doi: 10.1109/ROBOT.2009.5152385,
- https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+ The orientation is represented by a quaternion.
+ See :class:`CartesianDMP` for details about the equation of the
+ transformation system.
While the dimension of the state space is 14, the dimension of the
velocity, acceleration, and forcing term is 12.
@@ -225,6 +212,20 @@ class DualCartesianDMP(WeightParametersMixin, DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Ude, A., Nemec, B., Petric, T., Murimoto, J. (2014).
+ Orientation in Cartesian space dynamic movement primitives.
+ In IEEE International Conference on Robotics and Automation (ICRA)
+ (pp. 2997-3004). DOI: 10.1109/ICRA.2014.6907291,
+ https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+
+ .. [2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009). Learning
+ and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
"""
def __init__(self, execution_time=1.0, dt=0.01, n_weights_per_dim=10,
int_dt=0.001, p_gain=0.0, smooth_scaling=False):
diff --git a/movement_primitives/dmp/_state_following_dmp.py b/movement_primitives/dmp/_state_following_dmp.py
index 288c617..1ff4c27 100644
--- a/movement_primitives/dmp/_state_following_dmp.py
+++ b/movement_primitives/dmp/_state_following_dmp.py
@@ -7,20 +7,22 @@
class StateFollowingDMP(WeightParametersMixin, DMPBase):
"""State following DMP (highly experimental).
- The DMP variant that is implemented here is described in
-
- J. Vidakovic, B. Jerbic, B. Sekoranja, M. Svaco, F. Suligoj:
- Task Dependent Trajectory Learning from Multiple Demonstrations Using
- Movement Primitives (2019),
- International Conference on Robotics in Alpe-Adria Danube Region (RAAD),
- pp. 275-282, doi: 10.1007/978-3-030-19648-6_32,
- https://link.springer.com/chapter/10.1007/978-3-030-19648-6_32
+ The DMP variant that is implemented here is described in [1]_.
Attributes
----------
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Vidakovic, J., Jerbic, B., Sekoranja, B., Svaco, M., Suligoj, F.
+ (2019). Task Dependent Trajectory Learning from Multiple Demonstrations
+ Using Movement Primitives. In International Conference on Robotics in
+ Alpe-Adria Danube Region (RAAD) (pp. 275-282). DOI:
+ 10.1007/978-3-030-19648-6_32,
+ https://link.springer.com/chapter/10.1007/978-3-030-19648-6_32
"""
def __init__(self, n_dims, execution_time, dt=0.01, n_viapoints=10,
int_dt=0.001):
diff --git a/movement_primitives/dmp_potential_field.py b/movement_primitives/dmp_potential_field.py
index 4c9aa29..023ad9e 100644
--- a/movement_primitives/dmp_potential_field.py
+++ b/movement_primitives/dmp_potential_field.py
@@ -1,4 +1,7 @@
-"""Visualization of DMP as potential field."""
+"""Potential Field of DMP
+======================
+
+Visualization of DMP as potential field."""
import numpy as np
from .dmp import (
dmp_transformation_system, obstacle_avoidance_acceleration_2d, phase)
diff --git a/movement_primitives/io.py b/movement_primitives/io.py
index dfe8c98..b66f1d9 100644
--- a/movement_primitives/io.py
+++ b/movement_primitives/io.py
@@ -1,4 +1,8 @@
-"""Input and output from and to files of movement primitives."""
+"""Input / Output
+==============
+
+Input and output from and to files of movement primitives.
+"""
import inspect
import json
import pickle
diff --git a/movement_primitives/kinematics.py b/movement_primitives/kinematics.py
index 8a99677..a96015d 100644
--- a/movement_primitives/kinematics.py
+++ b/movement_primitives/kinematics.py
@@ -1,4 +1,7 @@
-"""Forward kinematics and a simple implementation of inverse kinematics."""
+"""Kinematics
+==========
+
+Forward kinematics and a simple implementation of inverse kinematics."""
import math
import numpy as np
import numba
@@ -133,6 +136,9 @@ def create_chain(self, joint_names, base_frame, ee_frame, verbose=0):
class Chain:
"""Kinematic chain.
+ You should not call this constructor manually. Use :class:`Kinematics` to
+ create a kinematic chain.
+
Parameters
----------
tm : FastUrdfTransformManager
diff --git a/movement_primitives/plot.py b/movement_primitives/plot.py
index 7c1c2c0..465e50e 100644
--- a/movement_primitives/plot.py
+++ b/movement_primitives/plot.py
@@ -1,4 +1,8 @@
-"""Tools for plotting multi-dimensional trajectories."""
+"""Plotting Tools
+==============
+
+Tools for plotting multi-dimensional trajectories.
+"""
import matplotlib.pyplot as plt
diff --git a/movement_primitives/promp.py b/movement_primitives/promp.py
index 6ae564a..f25baae 100644
--- a/movement_primitives/promp.py
+++ b/movement_primitives/promp.py
@@ -1,12 +1,17 @@
-"""Probabilistic movement primitive."""
+"""Probabilistic Movement Primitive (ProMP)
+========================================
+
+ProMPs represent distributions of trajectories.
+"""
import numpy as np
class ProMP:
"""Probabilistic Movement Primitive (ProMP).
- ProMPs have been proposed first in [1] and have been used later in [2,3].
- The learning algorithm is a specialized form of the one presented in [4].
+ ProMPs have been proposed first in [1]_ and have been used later in [2]_,
+ [3]_. The learning algorithm is a specialized form of the one presented in
+ [4]_.
Note that internally we represented trajectories with the task space
dimension as the first axis and the time step as the second axis while
@@ -24,19 +29,27 @@ class ProMP:
References
----------
- [1] Paraschos et al.: Probabilistic movement primitives, NeurIPS (2013),
- https://papers.nips.cc/paper/2013/file/e53a0a2978c28872a4505bdb51db06dc-Paper.pdf
-
- [3] Maeda et al.: Probabilistic movement primitives for coordination of
- multiple human–robot collaborative tasks, AuRo 2017,
- https://link.springer.com/article/10.1007/s10514-016-9556-2
-
- [2] Paraschos et al.: Using probabilistic movement primitives in robotics, AuRo (2018),
- https://www.ias.informatik.tu-darmstadt.de/uploads/Team/AlexandrosParaschos/promps_auro.pdf,
- https://link.springer.com/article/10.1007/s10514-017-9648-7
-
- [4] Lazaric et al.: Bayesian Multi-Task Reinforcement Learning, ICML (2010),
- https://hal.inria.fr/inria-00475214/document
+ .. [1] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2013).
+ Probabilistic movement primitives, In C.J. Burges and L. Bottou and M.
+ Welling and Z. Ghahramani and K.Q. Weinberger (Eds.), Advances in Neural
+ Information Processing Systems, 26,
+ https://papers.nips.cc/paper/2013/file/e53a0a2978c28872a4505bdb51db06dc-Paper.pdf
+
+ .. [3] Maeda, G. J., Neumann, G., Ewerton, M., Lioutikov, R., Kroemer, O.,
+ Peters, J. (2017). Probabilistic movement primitives for coordination of
+ multiple human–robot collaborative tasks. Autonomous Robots, 41, 593-612.
+ DOI: 10.1007/s10514-016-9556-2,
+ https://link.springer.com/article/10.1007/s10514-016-9556-2
+
+ .. [2] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2018).
+ Using probabilistic movement primitives in robotics. Autonomous Robots,
+ 42, 529-551. DOI: 10.1007/s10514-017-9648-7,
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Team/AlexandrosParaschos/promps_auro.pdf
+
+ .. [4] Lazaric, A., Ghavamzadeh, M. (2010).
+ Bayesian Multi-Task Reinforcement Learning. In Proceedings of the 27th
+ International Conference on International Conference on Machine Learning
+ (ICML'10) (pp. 599-606). https://hal.inria.fr/inria-00475214/document
"""
def __init__(self, n_dims, n_weights_per_dim=10):
self.n_dims = n_dims
diff --git a/movement_primitives/spring_damper.py b/movement_primitives/spring_damper.py
index 507834a..66f9869 100644
--- a/movement_primitives/spring_damper.py
+++ b/movement_primitives/spring_damper.py
@@ -1,4 +1,8 @@
-"""Spring-damper based attractors."""
+"""Spring-Damper Based Attractors
+==============================
+
+Spring-damper based attractors are the basis of a DMP's transformation system.
+"""
import numpy as np
import pytransform3d.rotations as pr
from .base import PointToPointMovement
diff --git a/movement_primitives/visualization.py b/movement_primitives/visualization.py
index 7a946c8..abd4375 100644
--- a/movement_primitives/visualization.py
+++ b/movement_primitives/visualization.py
@@ -1,4 +1,8 @@
-"""3D visualization tools for movement primitives."""
+"""Visualization Tools
+===================
+
+3D visualization tools for movement primitives.
+"""
import numpy as np
import open3d as o3d
import scipy as sp
diff --git a/setup.py b/setup.py
index 149e8f3..b46ccaa 100644
--- a/setup.py
+++ b/setup.py
@@ -25,7 +25,8 @@
extras_require={
"all": ["pytransform3d", "cython", "numpy", "scipy", "matplotlib",
"open3d", "tqdm", "gmr", "PyYAML", "numba", "pybullet"],
- "doc": ["pdoc3"],
+ "doc": ["sphinx", "sphinx-bootstrap-theme", "numpydoc",
+ "myst-parser"],
"test": ["nose", "coverage"]
}
)
@@ -157,7 +100,7 @@ trajectories that can be conditioned on viapoints. In this example, we
plot the resulting posterior distribution after conditioning on varying
start positions.
-[Script](examples/plot_conditional_promp.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_conditional_promp.py)
### Potential Field of 2D DMP
@@ -167,7 +110,7 @@ A Dynamical Movement Primitive defines a potential field that superimposes
several components: transformation system (goal-directed movement), forcing
term (learned shape), and coupling terms (e.g., obstacle avoidance).
-[Script](examples/plot_dmp_potential_field.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_dmp_potential_field.py)
### DMP with Final Velocity
@@ -177,7 +120,7 @@ Not all DMPs allow a final velocity > 0. In this case we analyze the effect
of changing final velocities in an appropriate variation of the DMP
formulation that allows to set the final velocity.
-[Script](examples/plot_dmp_with_final_velocity.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_dmp_with_final_velocity.py)
### ProMPs
@@ -188,7 +131,7 @@ The LASA Handwriting dataset learned with ProMPs. The dataset consists of
demonstrations and the second and fourth column show the imitated ProMPs
with 1-sigma interval.
-[Script](examples/plot_promp_lasa.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/plot_promp_lasa.py)
### Cartesian DMPs
@@ -197,7 +140,7 @@ with 1-sigma interval.
A trajectory is created manually, imitated with a Cartesian DMP, converted
to a joint trajectory by inverse kinematics, and executed with a UR5.
-[Script](examples/vis_cartesian_dmp.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/vis_cartesian_dmp.py)
### Contextual ProMPs
@@ -209,7 +152,7 @@ kinesthetic teaching. The panel width is considered to be the context over
which we generalize with contextual ProMPs. Each color in the above
visualizations corresponds to a ProMP for a different context.
-[Script](examples/external_dependencies/vis_contextual_promp_distribution.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_contextual_promp_distribution.py)
**Dependencies that are not publicly available:**
@@ -229,7 +172,7 @@ visualizations corresponds to a ProMP for a different context.
We offer specific dual Cartesian DMPs to control dual-arm robotic systems like
humanoid robots.
-Scripts: [Open3D](examples/external_dependencies/vis_solar_panel.py), [PyBullet](examples/external_dependencies/sim_solar_panel.py)
+Scripts: [Open3D](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_solar_panel.py), [PyBullet](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/sim_solar_panel.py)
**Dependencies that are not publicly available:**
@@ -251,7 +194,7 @@ We can introduce a coupling term in a dual Cartesian DMP to constrain the
relative position, orientation, or pose of two end-effectors of a dual-arm
robot.
-Scripts: [Open3D](examples/external_dependencies/vis_cartesian_dual_dmp.py), [PyBullet](examples/external_dependencies/sim_cartesian_dual_dmp.py)
+Scripts: [Open3D](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_cartesian_dual_dmp.py), [PyBullet](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/sim_cartesian_dual_dmp.py)
**Dependencies that are not publicly available:**
@@ -271,7 +214,7 @@ Scripts: [Open3D](examples/external_dependencies/vis_cartesian_dual_dmp.py), [Py
If we have a distribution over DMP parameters, we can propagate them to state
space through an unscented transform.
-[Script](examples/external_dependencies/vis_dmp_to_state_variance.py)
+[Script](https://github.com/dfki-ric/movement_primitives/blob/main/examples/external_dependencies/vis_dmp_to_state_variance.py)
**Dependencies that are not publicly available:**
@@ -286,6 +229,165 @@ space through an unscented transform.
git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
```
+## Build API Documentation
+
+You can build an API documentation with sphinx.
+You can install all dependencies with
+
+```bash
+python -m pip install movement_primitives[doc]
+```
+
+... and build the documentation from the folder `doc/` with
+
+```bash
+make html
+```
+
+It will be located at `doc/build/html/index.html`.
+
+## Test
+
+To run the tests some python libraries are required:
+
+```bash
+python -m pip install -e .[test]
+```
+
+The tests are located in the folder `test/` and can be executed with:
+`python -m nose test`
+
+This command searches for all files with `test` and executes the functions with `test_*`.
+
+## Contributing
+
+You can report bugs in the [issue tracker](https://github.com/dfki-ric/movement_primitives/issues).
+If you have questions about the software, please use the [discussions
+section](https://github.com/dfki-ric/movement_primitives/discussions).
+To add new features, documentation, or fix bugs you can open a pull request
+on [GitHub](https://github.com/dfki-ric/movement_primitives). Directly pushing
+to the main branch is not allowed.
+
+The recommended workflow to add a new feature, add documentation, or fix a bug
+is the following:
+
+* Push your changes to a branch (e.g., feature/x, doc/y, or fix/z) of your fork
+ of the repository.
+* Open a pull request to the main branch of the main repository.
+
+This is a checklist for new features:
+
+- are there unit tests?
+- does it have docstrings?
+- is it included in the API documentation?
+- run flake8 and pylint
+- should it be part of the readme?
+- should it be included in any example script?
+
+## Non-public Extensions
+
+Scripts from the subfolder `examples/external_dependencies/` require access to
+git repositories (URDF files or optional dependencies) and datasets that are
+not publicly available. They are available on request (email
+alexander.fabisch@dfki.de).
+
+Note that the library does not have any non-public dependencies! They are only
+required to run all examples.
+
+### MoCap Library
+
+```bash
+# untested: pip install git+https://git.hb.dfki.de/dfki-interaction/mocap.git
+git clone git@git.hb.dfki.de:dfki-interaction/mocap.git
+cd mocap
+python -m pip install -e .
+cd ..
+```
+
+### Get URDFs
+
+```bash
+# RH5
+git clone git@git.hb.dfki.de:models-robots/rh5_models/pybullet-only-arms-urdf.git --recursive
+# RH5v2
+git clone git@git.hb.dfki.de:models-robots/rh5v2_models/pybullet-urdf.git --recursive
+# Kuka
+git clone git@git.hb.dfki.de:models-robots/kuka_lbr.git
+# Solar panel
+git clone git@git.hb.dfki.de:models-objects/solar_panels.git
+# RH5 Gripper
+git clone git@git.hb.dfki.de:motto/abstract-urdf-gripper.git --recursive
+```
+
+### Data
+
+I assume that your data is located in the folder `data/` in most scripts.
+You should put a symlink there to point to your actual data folder.
+
+## Related Publications
+
+This library implements several types of dynamical movement primitives and
+probabilistic movement primitives. These are described in detail in the
+following papers.
+
+[1] Ijspeert, A. J., Nakanishi, J., Hoffmann, H., Pastor, P., Schaal, S. (2013).
+ Dynamical Movement Primitives: Learning Attractor Models for Motor
+ Behaviors, Neural Computation 25 (2), 328-373. DOI: 10.1162/NECO_a_00393,
+ https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+
+[2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009).
+ Learning and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+
+[3] Muelling, K., Kober, J., Kroemer, O., Peters, J. (2013).
+ Learning to Select and Generalize Striking Movements in Robot Table Tennis.
+ International Journal of Robotics Research 32 (3), 263-279.
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Publications/Muelling_IJRR_2013.pdf
+
+[4] Ude, A., Nemec, B., Petric, T., Murimoto, J. (2014).
+ Orientation in Cartesian space dynamic movement primitives.
+ In IEEE International Conference on Robotics and Automation (ICRA)
+ (pp. 2997-3004). DOI: 10.1109/ICRA.2014.6907291,
+ https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+
+[5] Gams, A., Nemec, B., Zlajpah, L., Wächter, M., Asfour, T., Ude, A. (2013).
+ Modulation of Motor Primitives using Force Feedback: Interaction with
+ the Environment and Bimanual Tasks (2013), In 2013 IEEE/RSJ International
+ Conference on Intelligent Robots and Systems (pp. 5629-5635). DOI:
+ 10.1109/IROS.2013.6697172,
+ https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
+
+[6] Vidakovic, J., Jerbic, B., Sekoranja, B., Svaco, M., Suligoj, F. (2019).
+ Task Dependent Trajectory Learning from Multiple Demonstrations Using
+ Movement Primitives (2019),
+ In International Conference on Robotics in Alpe-Adria Danube Region (RAAD)
+ (pp. 275-282). DOI: 10.1007/978-3-030-19648-6_32,
+ https://link.springer.com/chapter/10.1007/978-3-030-19648-6_32
+
+[7] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2013).
+ Probabilistic movement primitives, In C.J. Burges and L. Bottou and M.
+ Welling and Z. Ghahramani and K.Q. Weinberger (Eds.), Advances in Neural
+ Information Processing Systems, 26,
+ https://papers.nips.cc/paper/2013/file/e53a0a2978c28872a4505bdb51db06dc-Paper.pdf
+
+[8] Maeda, G. J., Neumann, G., Ewerton, M., Lioutikov, R., Kroemer, O.,
+ Peters, J. (2017). Probabilistic movement primitives for coordination of
+ multiple human–robot collaborative tasks. Autonomous Robots, 41, 593-612.
+ DOI: 10.1007/s10514-016-9556-2,
+ https://link.springer.com/article/10.1007/s10514-016-9556-2
+
+[9] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2018).
+ Using probabilistic movement primitives in robotics. Autonomous Robots, 42,
+ 529-551. DOI: 10.1007/s10514-017-9648-7,
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Team/AlexandrosParaschos/promps_auro.pdf
+
+[10] Lazaric, A., Ghavamzadeh, M. (2010).
+ Bayesian Multi-Task Reinforcement Learning. In Proceedings of the 27th
+ International Conference on International Conference on Machine Learning
+ (ICML'10) (pp. 599-606). https://hal.inria.fr/inria-00475214/document
+
## Funding
This library has been developed initially at the
diff --git a/doc/Makefile b/doc/Makefile
new file mode 100644
index 0000000..d0c3cbf
--- /dev/null
+++ b/doc/Makefile
@@ -0,0 +1,20 @@
+# Minimal makefile for Sphinx documentation
+#
+
+# You can set these variables from the command line, and also
+# from the environment for the first two.
+SPHINXOPTS ?=
+SPHINXBUILD ?= sphinx-build
+SOURCEDIR = source
+BUILDDIR = build
+
+# Put it first so that "make" without argument is like "make help".
+help:
+ @$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
+
+.PHONY: help Makefile
+
+# Catch-all target: route all unknown targets to Sphinx using the new
+# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
+%: Makefile
+ @$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
diff --git a/doc/make.bat b/doc/make.bat
new file mode 100644
index 0000000..747ffb7
--- /dev/null
+++ b/doc/make.bat
@@ -0,0 +1,35 @@
+@ECHO OFF
+
+pushd %~dp0
+
+REM Command file for Sphinx documentation
+
+if "%SPHINXBUILD%" == "" (
+ set SPHINXBUILD=sphinx-build
+)
+set SOURCEDIR=source
+set BUILDDIR=build
+
+%SPHINXBUILD% >NUL 2>NUL
+if errorlevel 9009 (
+ echo.
+ echo.The 'sphinx-build' command was not found. Make sure you have Sphinx
+ echo.installed, then set the SPHINXBUILD environment variable to point
+ echo.to the full path of the 'sphinx-build' executable. Alternatively you
+ echo.may add the Sphinx directory to PATH.
+ echo.
+ echo.If you don't have Sphinx installed, grab it from
+ echo.https://www.sphinx-doc.org/
+ exit /b 1
+)
+
+if "%1" == "" goto help
+
+%SPHINXBUILD% -M %1 %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O%
+goto end
+
+:help
+%SPHINXBUILD% -M help %SOURCEDIR% %BUILDDIR% %SPHINXOPTS% %O%
+
+:end
+popd
diff --git a/doc/source/_templates/class.rst b/doc/source/_templates/class.rst
new file mode 100644
index 0000000..b29757c
--- /dev/null
+++ b/doc/source/_templates/class.rst
@@ -0,0 +1,32 @@
+{{ fullname | escape | underline}}
+
+.. currentmodule:: {{ module }}
+
+.. autoclass:: {{ objname }}
+ :members:
+ :show-inheritance:
+ :inherited-members:
+
+ {% block methods %}
+ .. automethod:: __init__
+
+ {% if methods %}
+ .. rubric:: {{ _('Methods') }}
+
+ .. autosummary::
+ {% for item in methods %}
+ ~{{ name }}.{{ item }}
+ {%- endfor %}
+ {% endif %}
+ {% endblock %}
+
+ {% block attributes %}
+ {% if attributes %}
+ .. rubric:: {{ _('Attributes') }}
+
+ .. autosummary::
+ {% for item in attributes %}
+ ~{{ name }}.{{ item }}
+ {%- endfor %}
+ {% endif %}
+ {% endblock %}
diff --git a/doc/source/api.rst b/doc/source/api.rst
new file mode 100644
index 0000000..2bf4443
--- /dev/null
+++ b/doc/source/api.rst
@@ -0,0 +1,160 @@
+.. _api:
+
+=================
+API Documentation
+=================
+
+This is the detailed documentation of all public classes and functions.
+You can also search for specific modules, classes, or functions in the
+:ref:`genindex`.
+
+.. contents:: :local:
+ :depth: 1
+
+
+:mod:`movement_primitives.dmp`
+==============================
+
+.. automodule:: movement_primitives.dmp
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.dmp.DMP
+ ~movement_primitives.dmp.DMPWithFinalVelocity
+ ~movement_primitives.dmp.CartesianDMP
+ ~movement_primitives.dmp.DualCartesianDMP
+ ~movement_primitives.dmp.DMPBase
+ ~movement_primitives.dmp.WeightParametersMixin
+ ~movement_primitives.dmp.CouplingTermPos1DToPos1D
+ ~movement_primitives.dmp.CouplingTermObstacleAvoidance2D
+ ~movement_primitives.dmp.CouplingTermObstacleAvoidance3D
+ ~movement_primitives.dmp.CouplingTermPos3DToPos3D
+ ~movement_primitives.dmp.CouplingTermDualCartesianPose
+ ~movement_primitives.dmp.CouplingTermObstacleAvoidance3D
+ ~movement_primitives.dmp.CouplingTermDualCartesianDistance
+ ~movement_primitives.dmp.CouplingTermDualCartesianTrajectory
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.dmp.dmp_transformation_system
+ ~movement_primitives.dmp.canonical_system_alpha
+ ~movement_primitives.dmp.phase
+ ~movement_primitives.dmp.obstacle_avoidance_acceleration_2d
+ ~movement_primitives.dmp.obstacle_avoidance_acceleration_3d
+
+
+:mod:`movement_primitives.promp`
+================================
+
+.. automodule:: movement_primitives.promp
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.promp.ProMP
+
+
+:mod:`movement_primitives.io`
+=============================
+
+.. automodule:: movement_primitives.io
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.io.write_pickle
+ ~movement_primitives.io.read_pickle
+ ~movement_primitives.io.write_yaml
+ ~movement_primitives.io.read_yaml
+ ~movement_primitives.io.write_json
+ ~movement_primitives.io.read_json
+
+
+:mod:`movement_primitives.base`
+===============================
+
+.. automodule:: movement_primitives.base
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.base.PointToPointMovement
+
+
+:mod:`movement_primitives.data`
+===============================
+
+.. automodule:: movement_primitives.data
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.data.load_lasa
+ ~movement_primitives.data.generate_minimum_jerk
+ ~movement_primitives.data.generate_1d_trajectory_distribution
+
+
+:mod:`movement_primitives.kinematics`
+=====================================
+
+.. automodule:: movement_primitives.kinematics
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.kinematics.Kinematics
+ ~movement_primitives.kinematics.Chain
+
+
+:mod:`movement_primitives.plot`
+===============================
+
+.. automodule:: movement_primitives.plot
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.plot.plot_trajectory_in_rows
+ ~movement_primitives.plot.plot_distribution_in_rows
+
+
+:mod:`movement_primitives.visualization`
+========================================
+
+.. automodule:: movement_primitives.visualization
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.visualization.plot_pointcloud
+ ~movement_primitives.visualization.to_ellipsoid
+
+
+:mod:`movement_primitives.dmp_potential_field`
+==============================================
+
+.. automodule:: movement_primitives.dmp_potential_field
+
+.. autosummary::
+ :toctree: _apidoc/
+
+ ~movement_primitives.dmp_potential_field.plot_potential_field_2d
+
+
+:mod:`movement_primitives.spring_damper`
+========================================
+
+.. automodule:: movement_primitives.spring_damper
+
+.. autosummary::
+ :toctree: _apidoc/
+ :template: class.rst
+
+ ~movement_primitives.spring_damper.SpringDamper
+ ~movement_primitives.spring_damper.SpringDamperOrientation
diff --git a/doc/source/conf.py b/doc/source/conf.py
new file mode 100644
index 0000000..8d7930d
--- /dev/null
+++ b/doc/source/conf.py
@@ -0,0 +1,93 @@
+# Configuration file for the Sphinx documentation builder.
+#
+# This file only contains a selection of the most common options. For a full
+# list see the documentation:
+# https://www.sphinx-doc.org/en/master/usage/configuration.html
+
+# -- Path setup --------------------------------------------------------------
+
+# If extensions (or modules to document with autodoc) are in another directory,
+# add these directories to sys.path here. If the directory is relative to the
+# documentation root, use os.path.abspath to make it absolute, like shown here.
+#
+import os
+import sys
+import time
+import sphinx_bootstrap_theme
+
+
+sys.path.insert(0, os.path.abspath('.'))
+sys.path.insert(0, os.path.abspath('../..'))
+
+
+# -- Project information -----------------------------------------------------
+
+project = "movement_primitives"
+copyright = "2020-{}, Alexander Fabisch, DFKI GmbH, Robotics Innovation Center".format(time.strftime("%Y"))
+author = "Alexander Fabisch"
+
+# The full version, including alpha/beta/rc tags
+release = __import__(project).__version__
+
+
+# -- General configuration ---------------------------------------------------
+
+# Add any Sphinx extension module names here, as strings. They can be
+# extensions coming with Sphinx (named 'sphinx.ext.*') or your custom
+# ones.
+extensions = [
+ "numpydoc",
+ "myst_parser",
+ "sphinx.ext.autodoc",
+ "sphinx.ext.autosummary"
+]
+
+# Add any paths that contain templates here, relative to this directory.
+templates_path = ['_templates']
+
+# List of patterns, relative to source directory, that match files and
+# directories to ignore when looking for source files.
+# This pattern also affects html_static_path and html_extra_path.
+exclude_patterns = []
+
+autosummary_generate = True
+
+
+# -- Options for HTML output -------------------------------------------------
+
+# The theme to use for HTML and HTML Help pages. See the documentation for
+# a list of builtin themes.
+#
+html_theme = "bootstrap"
+html_theme_path = sphinx_bootstrap_theme.get_html_theme_path()
+html_theme_options = {
+ "bootswatch_theme": "readable",
+ "navbar_sidebarrel": False,
+ "bootstrap_version": "3",
+ "nosidebar": True,
+ "body_max_width": "90%",
+ "navbar_links": [
+ ("Home", "index"),
+ ("API", "api"),
+ ],
+}
+
+root_doc = "index"
+source_suffix = {
+ ".rst": "restructuredtext",
+ ".md": "markdown",
+}
+
+# Add any paths that contain custom static files (such as style sheets) here,
+# relative to this directory. They are copied after the builtin static files,
+# so a file named "default.css" will overwrite the builtin "default.css".
+html_static_path = ["_static"]
+html_show_sourcelink = False
+html_show_sphinx = False
+
+intersphinx_mapping = {
+ 'python': ('https://docs.python.org/{.major}'.format(sys.version_info), None),
+ 'numpy': ('https://numpy.org/doc/stable', None),
+ 'scipy': ('https://docs.scipy.org/doc/scipy/reference', None),
+ 'matplotlib': ('https://matplotlib.org/', None)
+}
diff --git a/doc/source/index.md b/doc/source/index.md
new file mode 120000
index 0000000..fe84005
--- /dev/null
+++ b/doc/source/index.md
@@ -0,0 +1 @@
+../../README.md
\ No newline at end of file
diff --git a/movement_primitives/base.py b/movement_primitives/base.py
index ec3070e..17c4e73 100644
--- a/movement_primitives/base.py
+++ b/movement_primitives/base.py
@@ -1,4 +1,7 @@
-"""Base classes of movement primitives."""
+"""Base Classes
+============
+
+Base classes of movement primitives."""
import abc
import numpy as np
@@ -13,6 +16,44 @@ class PointToPointMovement(abc.ABC):
n_vel_dims : int
Number of dimensions of the velocity that will be controlled.
+
+ Attributes
+ ----------
+ n_dims : int
+ Number of state space dimensions.
+
+ n_vel_dims : int
+ Number of velocity dimensions.
+
+ t : float
+ Current time.
+
+ last_t : float
+ Time during last step.
+
+ start_y : array, shape (n_dims,)
+ Initial state.
+
+ start_yd : array, shape (n_vel_dims,)
+ Initial velocity.
+
+ start_ydd : array, shape (n_vel_dims,)
+ Initial acceleration.
+
+ goal_y : array, shape (n_dims,)
+ Goal state.
+
+ goal_yd : array, shape (n_vel_dims,)
+ Goal velocity.
+
+ goal_ydd : array, shape (n_vel_dims,)
+ Goal acceleration.
+
+ current_y : array, shape (n_dims,)
+ Current state.
+
+ current_yd : array, shape (n_vel_dims,)
+ Current velocity.
"""
def __init__(self, n_pos_dims, n_vel_dims):
self.n_dims = n_pos_dims
@@ -40,25 +81,25 @@ def configure(
Parameters
----------
t : float, optional
- Time at current step
+ Time at current step.
start_y : array, shape (n_dims,)
- Initial state
+ Initial state.
start_yd : array, shape (n_vel_dims,)
- Initial velocity
+ Initial velocity.
start_ydd : array, shape (n_vel_dims,)
- Initial acceleration
+ Initial acceleration.
goal_y : array, shape (n_dims,)
- Goal state
+ Goal state.
goal_yd : array, shape (n_vel_dims,)
- Goal velocity
+ Goal velocity.
goal_ydd : array, shape (n_vel_dims,)
- Goal acceleration
+ Goal acceleration.
"""
if t is not None:
self.t = t
diff --git a/movement_primitives/data/__init__.py b/movement_primitives/data/__init__.py
index 6d84bdb..ffcc7f2 100644
--- a/movement_primitives/data/__init__.py
+++ b/movement_primitives/data/__init__.py
@@ -1,4 +1,8 @@
-"""Tools for loading datasets."""
+"""Data
+====
+
+Tools for loading datasets.
+"""
from ._lasa import load_lasa
from ._minimum_jerk import generate_minimum_jerk
from ._toy_1d import generate_1d_trajectory_distribution
diff --git a/movement_primitives/dmp/__init__.py b/movement_primitives/dmp/__init__.py
index 2d7a3d7..12c58bd 100644
--- a/movement_primitives/dmp/__init__.py
+++ b/movement_primitives/dmp/__init__.py
@@ -1,4 +1,25 @@
-"""Dynamical movement primitive variants."""
+r"""Dynamical Movement Primitive (DMP)
+==================================
+
+This module provides implementations of various DMP types. DMPs consist of
+a goal-directed movement generated by the transformation system and a forcing
+term that defines the shape of the trajectory. They are time-dependent and
+usually converge to the goal after a constant execution time.
+
+Every implementation is slightly different, but we use a similar notation for
+all of them:
+
+* :math:`y,\dot{y},\ddot{y}` - position, velocity, and acceleration; these
+ might be translation components only, orientation, or both
+* :math:`y_0` - start position
+* :math:`g` - goal of the movement (attractor of the DMP)
+* :math:`\tau` - execution time
+* :math:`z` - phase variable, starts at 1 and converges to 0
+* :math:`f(z)` - forcing term, learned component that defines the shape of the
+ movement
+* :math:`C_t` - coupling term that is added to the acceleration of the DMP
+"""
+from ._base import DMPBase, WeightParametersMixin
from ._dmp import DMP, dmp_transformation_system
from ._dmp_with_final_velocity import DMPWithFinalVelocity
from ._cartesian_dmp import CartesianDMP
@@ -14,6 +35,7 @@
__all__ = [
+ "DMPBase", "WeightParametersMixin",
"DMP", "dmp_transformation_system", "DMPWithFinalVelocity", "CartesianDMP",
"DualCartesianDMP", "CouplingTermPos1DToPos1D",
"CouplingTermObstacleAvoidance2D", "CouplingTermObstacleAvoidance3D",
diff --git a/movement_primitives/dmp/_base.py b/movement_primitives/dmp/_base.py
index a9eed67..da883af 100644
--- a/movement_primitives/dmp/_base.py
+++ b/movement_primitives/dmp/_base.py
@@ -3,7 +3,16 @@
class DMPBase(PointToPointMovement):
- """Base class of Dynamical Movement Primitives (DMPs)."""
+ """Base class of Dynamical Movement Primitives (DMPs).
+
+ Parameters
+ ----------
+ n_pos_dims : int
+ Number of dimensions of the position that will be controlled.
+
+ n_vel_dims : int
+ Number of dimensions of the velocity that will be controlled.
+ """
def __init__(self, n_pos_dims, n_vel_dims):
super(DMPBase, self).__init__(n_pos_dims, n_vel_dims)
@@ -18,7 +27,12 @@ def reset(self):
class WeightParametersMixin:
- """Mixin class providing common access methods to forcing term weights."""
+ """Mixin class providing common access methods to forcing term weights.
+
+ This can be used, for instance, for black-box optimization of the weights
+ with respect to some cost / objective function in a reinforcement learning
+ setting.
+ """
def get_weights(self):
"""Get weight vector of DMP.
diff --git a/movement_primitives/dmp/_cartesian_dmp.py b/movement_primitives/dmp/_cartesian_dmp.py
index 701badf..20dd73f 100644
--- a/movement_primitives/dmp/_cartesian_dmp.py
+++ b/movement_primitives/dmp/_cartesian_dmp.py
@@ -151,29 +151,35 @@ def dmp_step_quaternion_python(
class CartesianDMP(DMPBase):
- """Cartesian dynamical movement primitive.
+ r"""Cartesian dynamical movement primitive.
The Cartesian DMP handles orientation and position separately. The
- orientation is represented by a quaternion. The quaternion DMP is
- implemented according to
+ orientation is represented by a quaternion.
- A. Ude, B. Nemec, T. Petric, J. Murimoto:
- Orientation in Cartesian space dynamic movement primitives (2014),
- IEEE International Conference on Robotics and Automation (ICRA),
- pp. 2997-3004, doi: 10.1109/ICRA.2014.6907291,
- https://ieeexplore.ieee.org/document/6907291,
- https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+ While the dimension of the state space is 7, the dimension of the
+ velocity, acceleration, and forcing term is 6.
- (if smooth scaling is activated) with modification of scaling proposed by
+ Equation of transformation system for the orientation (according to [1]_,
+ Eq. 16):
- P. Pastor, H. Hoffmann, T. Asfour, S. Schaal:
- Learning and Generalization of Motor Skills by Learning from Demonstration,
- 2009 IEEE International Conference on Robotics and Automation,
- Kobe, Japan, 2009, pp. 763-768, doi: 10.1109/ROBOT.2009.5152385,
- https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+ .. math::
- While the dimension of the state space is 7, the dimension of the
- velocity, acceleration, and forcing term is 6.
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y}) + f(z) + C_t) / \tau^2
+
+ Note that in this case :math:`y` is a quaternion in this case,
+ :math:`g - y` the quaternion difference (expressed as rotation vector),
+ :math:`\dot{y}` is the angular velocity, and :math:`\ddot{y}` the
+ angular acceleration.
+
+ With smooth scaling (according to [2]_):
+
+ .. math::
+
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y}
+ - \underline{\beta_y (g - y_0) z}) + f(z) + C_t) / \tau^2
+
+ The position is handled in the same way, just like in the original
+ :class:`DMP`.
Parameters
----------
@@ -202,6 +208,20 @@ class CartesianDMP(DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Ude, A., Nemec, B., Petric, T., Murimoto, J. (2014).
+ Orientation in Cartesian space dynamic movement primitives.
+ In IEEE International Conference on Robotics and Automation (ICRA)
+ (pp. 2997-3004). DOI: 10.1109/ICRA.2014.6907291,
+ https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+
+ .. [2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009). Learning
+ and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
"""
def __init__(
self, execution_time=1.0, dt=0.01, n_weights_per_dim=10,
diff --git a/movement_primitives/dmp/_coupling_terms.py b/movement_primitives/dmp/_coupling_terms.py
index 1dd4d40..cdf5085 100644
--- a/movement_primitives/dmp/_coupling_terms.py
+++ b/movement_primitives/dmp/_coupling_terms.py
@@ -65,8 +65,25 @@ def obstacle_avoidance_acceleration_2d(
return np.squeeze(cdd)
-class CouplingTermObstacleAvoidance2D: # for DMP
- """Coupling term for obstacle avoidance in 2D."""
+class CouplingTermObstacleAvoidance2D:
+ """Coupling term for obstacle avoidance in 2D.
+
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
+
+ This is the simplified 2D implementation of
+ :class:`CouplingTermObstacleAvoidance3D`.
+
+ Parameters
+ ----------
+ obstacle_position : array, shape (2,)
+ Position of the point obstacle.
+
+ gamma : float, optional (default: 1000)
+ Parameter of obstacle avoidance.
+
+ beta : float, optional (default: 20 / pi)
+ Parameter of obstacle avoidance.
+ """
def __init__(self, obstacle_position, gamma=1000.0, beta=20.0 / math.pi,
fast=False):
self.obstacle_position = obstacle_position
@@ -78,19 +95,101 @@ def __init__(self, obstacle_position, gamma=1000.0, beta=20.0 / math.pi,
self.step_function = obstacle_avoidance_acceleration_2d
def coupling(self, y, yd):
+ """Computes coupling term based on current state.
+
+ Parameters
+ ----------
+ y : array, shape (n_dims,)
+ Current position.
+
+ yd : array, shape (n_dims,)
+ Current velocity.
+
+ Returns
+ -------
+ cd : array, shape (n_dims,)
+ Velocity. 0 for this coupling term.
+
+ cdd : array, shape (n_dims,)
+ Acceleration.
+ """
cdd = self.step_function(
y, yd, self.obstacle_position, self.gamma, self.beta)
return np.zeros_like(cdd), cdd
class CouplingTermObstacleAvoidance3D: # for DMP
- """Coupling term for obstacle avoidance in 3D."""
+ r"""Coupling term for obstacle avoidance in 3D.
+
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
+
+ Following [1]_, this coupling term adds an acceleration
+
+ .. math::
+
+ \boldsymbol{C}_t = \gamma \boldsymbol{R} \dot{\boldsymbol{y}}
+ \theta \exp(-\beta \theta),
+
+ where
+
+ .. math::
+
+ \theta = \arccos\left( \frac{(\boldsymbol{o} - \boldsymbol{y})^T
+ \dot{\boldsymbol{y}}}{|\boldsymbol{o} - \boldsymbol{y}|
+ |\dot{\boldsymbol{y}}|} \right)
+
+ and a rotation axis :math:`\boldsymbol{r} =
+ (\boldsymbol{o} - \boldsymbol{y}) \times \dot{\boldsymbol{y}}` used to
+ compute the rotation matrix :math:`\boldsymbol{R}` that rotates about it
+ by 90 degrees for an obstacle at position :math:`\boldsymbol{o}`.
+
+ Intuitively, this coupling term adds a movement perpendicular to the
+ current velocity in the plane defined by the direction to the obstacle and
+ the current movement direction.
+
+ Parameters
+ ----------
+ obstacle_position : array, shape (3,)
+ Position of the point obstacle.
+
+ gamma : float, optional (default: 1000)
+ Parameter of obstacle avoidance.
+
+ beta : float, optional (default: 20 / pi)
+ Parameter of obstacle avoidance.
+
+ References
+ ----------
+ .. [1] Ijspeert, A. J., Nakanishi, J., Hoffmann, H., Pastor, P., Schaal, S.
+ (2013). Dynamical Movement Primitives: Learning Attractor Models for
+ Motor Behaviors. Neural Computation 25 (2), 328-373. DOI:
+ 10.1162/NECO_a_00393,
+ https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+ """
def __init__(self, obstacle_position, gamma=1000.0, beta=20.0 / math.pi):
self.obstacle_position = obstacle_position
self.gamma = gamma
self.beta = beta
def coupling(self, y, yd):
+ """Computes coupling term based on current state.
+
+ Parameters
+ ----------
+ y : array, shape (n_dims,)
+ Current position.
+
+ yd : array, shape (n_dims,)
+ Current velocity.
+
+ Returns
+ -------
+ cd : array, shape (n_dims,)
+ Velocity. 0 for this coupling term.
+
+ cdd : array, shape (n_dims,)
+ Acceleration.
+ """
cdd = obstacle_avoidance_acceleration_3d(
y, yd, self.obstacle_position, self.gamma, self.beta)
return np.zeros_like(cdd), cdd
@@ -135,10 +234,7 @@ def obstacle_avoidance_acceleration_3d(
class CouplingTermPos1DToPos1D:
"""Couples position components of a 2D DMP with a virtual spring.
- A. Gams, B. Nemec, L. Zlajpah, M. Wächter, T. Asfour, A. Ude:
- Modulation of Motor Primitives using Force Feedback: Interaction with
- the Environment and Bimanual Tasks (2013), IROS,
- https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
Parameters
----------
@@ -164,6 +260,15 @@ class CouplingTermPos1DToPos1D:
c2 : float, optional (default: 30)
Scaling factor for spring forces in the acceleration component.
+
+ References
+ ----------
+ .. [1] Gams, A., Nemec, B., Zlajpah, L., Wächter, M., Asfour, T., Ude, A.
+ (2013). Modulation of Motor Primitives using Force Feedback: Interaction
+ with the Environment and Bimanual Tasks (2013), In 2013 IEEE/RSJ
+ International Conference on Intelligent Robots and Systems (pp.
+ 5629-5635). DOI: 10.1109/IROS.2013.6697172,
+ https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
"""
def __init__(self, desired_distance, lf, k=1.0, c1=100.0, c2=30.0):
self.desired_distance = desired_distance
@@ -183,13 +288,10 @@ def coupling(self, y, yd=None):
return np.array([C12, C21]), np.array([C12dot, C21dot])
-class CouplingTermPos3DToPos3D: # for DMP
+class CouplingTermPos3DToPos3D:
"""Couples position components of a 6D DMP with a virtual spring in 3D.
- A. Gams, B. Nemec, L. Zlajpah, M. Wächter, T. Asfour, A. Ude:
- Modulation of Motor Primitives using Force Feedback: Interaction with
- the Environment and Bimanual Tasks (2013), IROS,
- https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
+ For :class:`DMP` and :class:`DMPWithFinalVelocity`.
Parameters
----------
@@ -215,6 +317,15 @@ class CouplingTermPos3DToPos3D: # for DMP
c2 : float, optional (default: 30)
Scaling factor for spring forces in the acceleration component.
+
+ References
+ ----------
+ .. [1] Gams, A., Nemec, B., Zlajpah, L., Wächter, M., Asfour, T., Ude, A.
+ (2013). Modulation of Motor Primitives using Force Feedback: Interaction
+ with the Environment and Bimanual Tasks (2013), In 2013 IEEE/RSJ
+ International Conference on Intelligent Robots and Systems (pp.
+ 5629-5635). DOI: 10.1109/IROS.2013.6697172,
+ https://h2t.anthropomatik.kit.edu/pdf/Gams2013.pdf
"""
def __init__(self, desired_distance, lf, k=1.0, c1=1.0, c2=30.0):
self.desired_distance = desired_distance
@@ -237,8 +348,36 @@ def coupling(self, y, yd=None):
return np.hstack([C12, C21]), np.hstack([C12dot, C21dot])
-class CouplingTermDualCartesianDistance: # for DualCartesianDMP
- """Couples distance between 3D positions of a dual Cartesian DMP."""
+class CouplingTermDualCartesianDistance:
+ """Couples distance between 3D positions of a dual Cartesian DMP.
+
+ For :class:`DualCartesianDMP`.
+
+ Parameters
+ ----------
+ desired_distance : float
+ Desired distance between components.
+
+ lf : array-like, shape (2,)
+ Binary values that indicate which DMP(s) will be adapted.
+ The variable lf defines the relation leader-follower. If lf[0] = lf[1],
+ then both robots will adapt their trajectories to follow average
+ trajectories at the defined distance dd between them [..]. On the other
+ hand, if lf[0] = 0 and lf[1] = 1, only DMP1 will change the trajectory
+ to match the trajectory of DMP0, again at the distance dd and again
+ only after learning. Vice versa applies as well. Leader-follower
+ relation can be determined by a higher-level planner [..].
+
+ k : float, optional (default: 1)
+ Virtual spring constant that couples the positions.
+
+ c1 : float, optional (default: 100)
+ Scaling factor for spring forces in the velocity component and
+ acceleration component.
+
+ c2 : float, optional (default: 30)
+ Scaling factor for spring forces in the acceleration component.
+ """
def __init__(self, desired_distance, lf, k=1.0, c1=1.0, c2=30.0):
self.desired_distance = desired_distance
self.lf = lf
@@ -260,8 +399,42 @@ def coupling(self, y, yd=None):
np.hstack([C12dot, np.zeros(3), C21dot, np.zeros(3)]))
-class CouplingTermDualCartesianPose: # for DualCartesianDMP
- """Couples relative poses of dual Cartesian DMP."""
+class CouplingTermDualCartesianPose:
+ """Couples relative poses of dual Cartesian DMP.
+
+ For :class:`DualCartesianDMP`.
+
+ Parameters
+ ----------
+ desired_distance : array, shape (4, 4)
+ Desired distance between components.
+
+ lf : array-like, shape (2,)
+ Binary values that indicate which DMP(s) will be adapted.
+ The variable lf defines the relation leader-follower. If lf[0] = lf[1],
+ then both robots will adapt their trajectories to follow average
+ trajectories at the defined distance dd between them [..]. On the other
+ hand, if lf[0] = 0 and lf[1] = 1, only DMP1 will change the trajectory
+ to match the trajectory of DMP0, again at the distance dd and again
+ only after learning. Vice versa applies as well. Leader-follower
+ relation can be determined by a higher-level planner [..].
+
+ couple_position : bool, optional (default: True)
+ Couple position between components.
+
+ couple_orientation : bool, optional (default: True)
+ Couple orientation between components.
+
+ k : float, optional (default: 1)
+ Virtual spring constant that couples the positions.
+
+ c1 : float, optional (default: 100)
+ Scaling factor for spring forces in the velocity component and
+ acceleration component.
+
+ c2 : float, optional (default: 30)
+ Scaling factor for spring forces in the acceleration component.
+ """
def __init__(self, desired_distance, lf, couple_position=True,
couple_orientation=True, k=1.0, c1=1.0, c2=30.0, verbose=0):
self.desired_distance = desired_distance
@@ -352,8 +525,43 @@ def _right2left_pq(self, y):
return right2left_pq
-class CouplingTermDualCartesianTrajectory(CouplingTermDualCartesianPose): # for DualCartesianDMP
- """Couples relative pose in dual Cartesian DMP with a given trajectory."""
+class CouplingTermDualCartesianTrajectory(CouplingTermDualCartesianPose):
+ """Couples relative pose in dual Cartesian DMP with a given trajectory.
+
+ For :class:`DualCartesianDMP`.
+
+ Parameters
+ ----------
+ offset : array, shape (7,)
+ Offset for desired distance between components as position and
+ quaternion.
+
+ lf : array-like, shape (2,)
+ Binary values that indicate which DMP(s) will be adapted.
+ The variable lf defines the relation leader-follower. If lf[0] = lf[1],
+ then both robots will adapt their trajectories to follow average
+ trajectories at the defined distance dd between them [..]. On the other
+ hand, if lf[0] = 0 and lf[1] = 1, only DMP1 will change the trajectory
+ to match the trajectory of DMP0, again at the distance dd and again
+ only after learning. Vice versa applies as well. Leader-follower
+ relation can be determined by a higher-level planner [..].
+
+ couple_position : bool, optional (default: True)
+ Couple position between components.
+
+ couple_orientation : bool, optional (default: True)
+ Couple orientation between components.
+
+ k : float, optional (default: 1)
+ Virtual spring constant that couples the positions.
+
+ c1 : float, optional (default: 100)
+ Scaling factor for spring forces in the velocity component and
+ acceleration component.
+
+ c2 : float, optional (default: 30)
+ Scaling factor for spring forces in the acceleration component.
+ """
def __init__(self, offset, lf, dt, couple_position=True,
couple_orientation=True, k=1.0, c1=1.0, c2=30.0, verbose=1):
self.offset = offset
diff --git a/movement_primitives/dmp/_dmp.py b/movement_primitives/dmp/_dmp.py
index 22697ea..3288d3a 100644
--- a/movement_primitives/dmp/_dmp.py
+++ b/movement_primitives/dmp/_dmp.py
@@ -340,23 +340,19 @@ def dmp_step_euler(
class DMP(WeightParametersMixin, DMPBase):
- """Dynamical movement primitive (DMP).
+ r"""Dynamical movement primitive (DMP).
- Implementation according to
+ Equation of transformation system (according to [1]_, Eq. 2.1):
- A.J. Ijspeert, J. Nakanishi, H. Hoffmann, P. Pastor, S. Schaal:
- Dynamical Movement Primitives: Learning Attractor Models for Motor
- Behaviors (2013), Neural Computation 25(2), pp. 328-373, doi:
- 10.1162/NECO_a_00393, https://ieeexplore.ieee.org/document/6797340,
- https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+ .. math::
- (if smooth scaling is activated) with modification of scaling proposed by
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y}) + f(z) + C_t) / \tau^2
- P. Pastor, H. Hoffmann, T. Asfour, S. Schaal:
- Learning and Generalization of Motor Skills by Learning from Demonstration,
- 2009 IEEE International Conference on Robotics and Automation,
- Kobe, Japan, 2009, pp. 763-768, doi: 10.1109/ROBOT.2009.5152385,
- https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+ and if smooth scaling is activated (according to [2]_):
+
+ .. math::
+
+ \ddot{y} = (\alpha_y (\beta_y (g - y) - \tau \dot{y} - \underline{\beta_y (g - y_0) z}) + f(z) + C_t) / \tau^2
Parameters
----------
@@ -364,16 +360,16 @@ class DMP(WeightParametersMixin, DMPBase):
State space dimensions.
execution_time : float, optional (default: 1)
- Execution time of the DMP.
+ Execution time of the DMP: :math:`\tau`.
dt : float, optional (default: 0.01)
- Time difference between DMP steps.
+ Time difference between DMP steps: :math:`\Delta t`.
n_weights_per_dim : int, optional (default: 10)
Number of weights of the function approximator per dimension.
int_dt : float, optional (default: 0.001)
- Time difference for Euler integration.
+ Time difference for Euler integration of transformation system.
p_gain : float, optional (default: 0)
Gain for proportional controller of DMP tracking error.
@@ -392,6 +388,20 @@ class DMP(WeightParametersMixin, DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Ijspeert, A. J., Nakanishi, J., Hoffmann, H., Pastor, P., Schaal, S.
+ (2013). Dynamical Movement Primitives: Learning Attractor Models for
+ Motor Behaviors. Neural Computation 25 (2), 328-373. DOI:
+ 10.1162/NECO_a_00393,
+ https://homes.cs.washington.edu/~todorov/courses/amath579/reading/DynamicPrimitives.pdf
+
+ .. [2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009). Learning
+ and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
"""
def __init__(self, n_dims, execution_time=1.0, dt=0.01,
n_weights_per_dim=10, int_dt=0.001, p_gain=0.0,
diff --git a/movement_primitives/dmp/_dmp_with_final_velocity.py b/movement_primitives/dmp/_dmp_with_final_velocity.py
index 3803188..b7f34d0 100644
--- a/movement_primitives/dmp/_dmp_with_final_velocity.py
+++ b/movement_primitives/dmp/_dmp_with_final_velocity.py
@@ -6,14 +6,13 @@
class DMPWithFinalVelocity(WeightParametersMixin, DMPBase):
- """Dynamical movement primitive (DMP) with final velocity.
+ r"""Dynamical movement primitive (DMP) with final velocity.
- Implementation according to
+ Equation of transformation system (according to [1]_, Eq. 6):
- K. Muelling, J. Kober, O. Kroemer, J. Peters:
- Learning to Select and Generalize Striking Movements in Robot Table Tennis
- (2013), International Journal of Robotics Research 32(3), pp. 263-279,
- https://www.ias.informatik.tu-darmstadt.de/uploads/Publications/Muelling_IJRR_2013.pdf
+ .. math::
+
+ \ddot{y} = (\alpha_y (\beta_y (g - y) + \tau\dot{g} - \tau \dot{y}) + f(z))/\tau^2
Parameters
----------
@@ -21,10 +20,10 @@ class DMPWithFinalVelocity(WeightParametersMixin, DMPBase):
State space dimensions.
execution_time : float, optional (default: 1)
- Execution time of the DMP.
+ Execution time of the DMP: :math:`\tau`.
dt : float, optional (default: 0.01)
- Time difference between DMP steps.
+ Time difference between DMP steps: :math:`\Delta t`.
n_weights_per_dim : int, optional (default: 10)
Number of weights of the function approximator per dimension.
@@ -44,6 +43,13 @@ class DMPWithFinalVelocity(WeightParametersMixin, DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Muelling, K., Kober, J., Kroemer, O., Peters, J. (2013). Learning to
+ Select and Generalize Striking Movements in Robot Table Tennis.
+ International Journal of Robotics Research 32 (3), 263-279.
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Publications/Muelling_IJRR_2013.pdf
"""
def __init__(self, n_dims, execution_time=1.0, dt=0.01,
n_weights_per_dim=10, int_dt=0.001, p_gain=0.0):
diff --git a/movement_primitives/dmp/_dual_cartesian_dmp.py b/movement_primitives/dmp/_dual_cartesian_dmp.py
index 8089839..b948718 100644
--- a/movement_primitives/dmp/_dual_cartesian_dmp.py
+++ b/movement_primitives/dmp/_dual_cartesian_dmp.py
@@ -174,22 +174,9 @@ class DualCartesianDMP(WeightParametersMixin, DMPBase):
"""Dual cartesian dynamical movement primitive.
Each of the two Cartesian DMPs handles orientation and position separately.
- The orientation is represented by a quaternion. The quaternion DMP is
- implemented according to
-
- A. Ude, B. Nemec, T. Petric, J. Murimoto:
- Orientation in Cartesian space dynamic movement primitives (2014),
- IEEE International Conference on Robotics and Automation (ICRA),
- pp. 2997-3004, doi: 10.1109/ICRA.2014.6907291,
- https://ieeexplore.ieee.org/document/6907291
-
- (if smooth scaling is activated) with modification of scaling proposed by
-
- P. Pastor, H. Hoffmann, T. Asfour, S. Schaal:
- Learning and Generalization of Motor Skills by Learning from Demonstration,
- 2009 IEEE International Conference on Robotics and Automation,
- Kobe, Japan, 2009, pp. 763-768, doi: 10.1109/ROBOT.2009.5152385,
- https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
+ The orientation is represented by a quaternion.
+ See :class:`CartesianDMP` for details about the equation of the
+ transformation system.
While the dimension of the state space is 14, the dimension of the
velocity, acceleration, and forcing term is 12.
@@ -225,6 +212,20 @@ class DualCartesianDMP(WeightParametersMixin, DMPBase):
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Ude, A., Nemec, B., Petric, T., Murimoto, J. (2014).
+ Orientation in Cartesian space dynamic movement primitives.
+ In IEEE International Conference on Robotics and Automation (ICRA)
+ (pp. 2997-3004). DOI: 10.1109/ICRA.2014.6907291,
+ https://acat-project.eu/modules/BibtexModule/uploads/PDF/udenemecpetric2014.pdf
+
+ .. [2] Pastor, P., Hoffmann, H., Asfour, T., Schaal, S. (2009). Learning
+ and Generalization of Motor Skills by Learning from Demonstration.
+ In 2009 IEEE International Conference on Robotics and Automation,
+ (pp. 763-768). DOI: 10.1109/ROBOT.2009.5152385,
+ https://h2t.iar.kit.edu/pdf/Pastor2009.pdf
"""
def __init__(self, execution_time=1.0, dt=0.01, n_weights_per_dim=10,
int_dt=0.001, p_gain=0.0, smooth_scaling=False):
diff --git a/movement_primitives/dmp/_state_following_dmp.py b/movement_primitives/dmp/_state_following_dmp.py
index 288c617..1ff4c27 100644
--- a/movement_primitives/dmp/_state_following_dmp.py
+++ b/movement_primitives/dmp/_state_following_dmp.py
@@ -7,20 +7,22 @@
class StateFollowingDMP(WeightParametersMixin, DMPBase):
"""State following DMP (highly experimental).
- The DMP variant that is implemented here is described in
-
- J. Vidakovic, B. Jerbic, B. Sekoranja, M. Svaco, F. Suligoj:
- Task Dependent Trajectory Learning from Multiple Demonstrations Using
- Movement Primitives (2019),
- International Conference on Robotics in Alpe-Adria Danube Region (RAAD),
- pp. 275-282, doi: 10.1007/978-3-030-19648-6_32,
- https://link.springer.com/chapter/10.1007/978-3-030-19648-6_32
+ The DMP variant that is implemented here is described in [1]_.
Attributes
----------
dt_ : float
Time difference between DMP steps. This value can be changed to adapt
the frequency.
+
+ References
+ ----------
+ .. [1] Vidakovic, J., Jerbic, B., Sekoranja, B., Svaco, M., Suligoj, F.
+ (2019). Task Dependent Trajectory Learning from Multiple Demonstrations
+ Using Movement Primitives. In International Conference on Robotics in
+ Alpe-Adria Danube Region (RAAD) (pp. 275-282). DOI:
+ 10.1007/978-3-030-19648-6_32,
+ https://link.springer.com/chapter/10.1007/978-3-030-19648-6_32
"""
def __init__(self, n_dims, execution_time, dt=0.01, n_viapoints=10,
int_dt=0.001):
diff --git a/movement_primitives/dmp_potential_field.py b/movement_primitives/dmp_potential_field.py
index 4c9aa29..023ad9e 100644
--- a/movement_primitives/dmp_potential_field.py
+++ b/movement_primitives/dmp_potential_field.py
@@ -1,4 +1,7 @@
-"""Visualization of DMP as potential field."""
+"""Potential Field of DMP
+======================
+
+Visualization of DMP as potential field."""
import numpy as np
from .dmp import (
dmp_transformation_system, obstacle_avoidance_acceleration_2d, phase)
diff --git a/movement_primitives/io.py b/movement_primitives/io.py
index dfe8c98..b66f1d9 100644
--- a/movement_primitives/io.py
+++ b/movement_primitives/io.py
@@ -1,4 +1,8 @@
-"""Input and output from and to files of movement primitives."""
+"""Input / Output
+==============
+
+Input and output from and to files of movement primitives.
+"""
import inspect
import json
import pickle
diff --git a/movement_primitives/kinematics.py b/movement_primitives/kinematics.py
index 8a99677..a96015d 100644
--- a/movement_primitives/kinematics.py
+++ b/movement_primitives/kinematics.py
@@ -1,4 +1,7 @@
-"""Forward kinematics and a simple implementation of inverse kinematics."""
+"""Kinematics
+==========
+
+Forward kinematics and a simple implementation of inverse kinematics."""
import math
import numpy as np
import numba
@@ -133,6 +136,9 @@ def create_chain(self, joint_names, base_frame, ee_frame, verbose=0):
class Chain:
"""Kinematic chain.
+ You should not call this constructor manually. Use :class:`Kinematics` to
+ create a kinematic chain.
+
Parameters
----------
tm : FastUrdfTransformManager
diff --git a/movement_primitives/plot.py b/movement_primitives/plot.py
index 7c1c2c0..465e50e 100644
--- a/movement_primitives/plot.py
+++ b/movement_primitives/plot.py
@@ -1,4 +1,8 @@
-"""Tools for plotting multi-dimensional trajectories."""
+"""Plotting Tools
+==============
+
+Tools for plotting multi-dimensional trajectories.
+"""
import matplotlib.pyplot as plt
diff --git a/movement_primitives/promp.py b/movement_primitives/promp.py
index 6ae564a..f25baae 100644
--- a/movement_primitives/promp.py
+++ b/movement_primitives/promp.py
@@ -1,12 +1,17 @@
-"""Probabilistic movement primitive."""
+"""Probabilistic Movement Primitive (ProMP)
+========================================
+
+ProMPs represent distributions of trajectories.
+"""
import numpy as np
class ProMP:
"""Probabilistic Movement Primitive (ProMP).
- ProMPs have been proposed first in [1] and have been used later in [2,3].
- The learning algorithm is a specialized form of the one presented in [4].
+ ProMPs have been proposed first in [1]_ and have been used later in [2]_,
+ [3]_. The learning algorithm is a specialized form of the one presented in
+ [4]_.
Note that internally we represented trajectories with the task space
dimension as the first axis and the time step as the second axis while
@@ -24,19 +29,27 @@ class ProMP:
References
----------
- [1] Paraschos et al.: Probabilistic movement primitives, NeurIPS (2013),
- https://papers.nips.cc/paper/2013/file/e53a0a2978c28872a4505bdb51db06dc-Paper.pdf
-
- [3] Maeda et al.: Probabilistic movement primitives for coordination of
- multiple human–robot collaborative tasks, AuRo 2017,
- https://link.springer.com/article/10.1007/s10514-016-9556-2
-
- [2] Paraschos et al.: Using probabilistic movement primitives in robotics, AuRo (2018),
- https://www.ias.informatik.tu-darmstadt.de/uploads/Team/AlexandrosParaschos/promps_auro.pdf,
- https://link.springer.com/article/10.1007/s10514-017-9648-7
-
- [4] Lazaric et al.: Bayesian Multi-Task Reinforcement Learning, ICML (2010),
- https://hal.inria.fr/inria-00475214/document
+ .. [1] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2013).
+ Probabilistic movement primitives, In C.J. Burges and L. Bottou and M.
+ Welling and Z. Ghahramani and K.Q. Weinberger (Eds.), Advances in Neural
+ Information Processing Systems, 26,
+ https://papers.nips.cc/paper/2013/file/e53a0a2978c28872a4505bdb51db06dc-Paper.pdf
+
+ .. [3] Maeda, G. J., Neumann, G., Ewerton, M., Lioutikov, R., Kroemer, O.,
+ Peters, J. (2017). Probabilistic movement primitives for coordination of
+ multiple human–robot collaborative tasks. Autonomous Robots, 41, 593-612.
+ DOI: 10.1007/s10514-016-9556-2,
+ https://link.springer.com/article/10.1007/s10514-016-9556-2
+
+ .. [2] Paraschos, A., Daniel, C., Peters, J., Neumann, G. (2018).
+ Using probabilistic movement primitives in robotics. Autonomous Robots,
+ 42, 529-551. DOI: 10.1007/s10514-017-9648-7,
+ https://www.ias.informatik.tu-darmstadt.de/uploads/Team/AlexandrosParaschos/promps_auro.pdf
+
+ .. [4] Lazaric, A., Ghavamzadeh, M. (2010).
+ Bayesian Multi-Task Reinforcement Learning. In Proceedings of the 27th
+ International Conference on International Conference on Machine Learning
+ (ICML'10) (pp. 599-606). https://hal.inria.fr/inria-00475214/document
"""
def __init__(self, n_dims, n_weights_per_dim=10):
self.n_dims = n_dims
diff --git a/movement_primitives/spring_damper.py b/movement_primitives/spring_damper.py
index 507834a..66f9869 100644
--- a/movement_primitives/spring_damper.py
+++ b/movement_primitives/spring_damper.py
@@ -1,4 +1,8 @@
-"""Spring-damper based attractors."""
+"""Spring-Damper Based Attractors
+==============================
+
+Spring-damper based attractors are the basis of a DMP's transformation system.
+"""
import numpy as np
import pytransform3d.rotations as pr
from .base import PointToPointMovement
diff --git a/movement_primitives/visualization.py b/movement_primitives/visualization.py
index 7a946c8..abd4375 100644
--- a/movement_primitives/visualization.py
+++ b/movement_primitives/visualization.py
@@ -1,4 +1,8 @@
-"""3D visualization tools for movement primitives."""
+"""Visualization Tools
+===================
+
+3D visualization tools for movement primitives.
+"""
import numpy as np
import open3d as o3d
import scipy as sp
diff --git a/setup.py b/setup.py
index 149e8f3..b46ccaa 100644
--- a/setup.py
+++ b/setup.py
@@ -25,7 +25,8 @@
extras_require={
"all": ["pytransform3d", "cython", "numpy", "scipy", "matplotlib",
"open3d", "tqdm", "gmr", "PyYAML", "numba", "pybullet"],
- "doc": ["pdoc3"],
+ "doc": ["sphinx", "sphinx-bootstrap-theme", "numpydoc",
+ "myst-parser"],
"test": ["nose", "coverage"]
}
)