给你一个下标从 0 开始的整数矩阵 grid ,矩阵大小为 m x n ,由从 0 到 m * n - 1 的不同整数组成。你可以在此矩阵中,从一个单元格移动到 下一行 的任何其他单元格。如果你位于单元格 (x, y) ,且满足 x < m - 1 ,你可以移动到 (x + 1, 0), (x + 1, 1), ..., (x + 1, n - 1) 中的任何一个单元格。注意: 在最后一行中的单元格不能触发移动。
每次可能的移动都需要付出对应的代价,代价用一个下标从 0 开始的二维数组 moveCost 表示,该数组大小为 (m * n) x n ,其中 moveCost[i][j] 是从值为 i 的单元格移动到下一行第 j 列单元格的代价。从 grid 最后一行的单元格移动的代价可以忽略。
grid 一条路径的代价是:所有路径经过的单元格的 值之和 加上 所有移动的 代价之和 。从 第一行 任意单元格出发,返回到达 最后一行 任意单元格的最小路径代价。
示例 1:
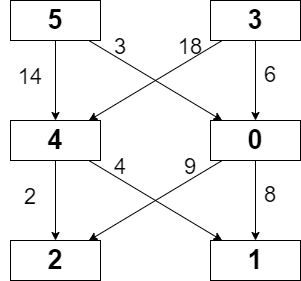
输入:grid = [[5,3],[4,0],[2,1]], moveCost = [[9,8],[1,5],[10,12],[18,6],[2,4],[14,3]] 输出:17 解释:最小代价的路径是 5 -> 0 -> 1 。 - 路径途经单元格值之和 5 + 0 + 1 = 6 。 - 从 5 移动到 0 的代价为 3 。 - 从 0 移动到 1 的代价为 8 。 路径总代价为 6 + 3 + 8 = 17 。
示例 2:
输入:grid = [[5,1,2],[4,0,3]], moveCost = [[12,10,15],[20,23,8],[21,7,1],[8,1,13],[9,10,25],[5,3,2]] 输出:6 解释: 最小代价的路径是 2 -> 3 。 - 路径途经单元格值之和 2 + 3 = 5 。 - 从 2 移动到 3 的代价为 1 。 路径总代价为 5 + 1 = 6 。
提示:
m == grid.lengthn == grid[i].length2 <= m, n <= 50grid由从0到m * n - 1的不同整数组成moveCost.length == m * nmoveCost[i].length == n1 <= moveCost[i][j] <= 100
方法一:动态规划
我们定义
其中
最终答案即为
由于每次转移只需要用到上一行的状态,因此可以将空间复杂度优化到
时间复杂度
class Solution:
def minPathCost(self, grid: List[List[int]], moveCost: List[List[int]]) -> int:
m, n = len(grid), len(grid[0])
f = grid[0]
for i in range(1, m):
g = [inf] * n
for j in range(n):
for k in range(n):
g[j] = min(g[j], f[k] + moveCost[grid[i - 1][k]][j] + grid[i][j])
f = g
return min(f)class Solution {
public int minPathCost(int[][] grid, int[][] moveCost) {
int m = grid.length, n = grid[0].length;
int[] f = grid[0];
final int inf = 1 << 30;
for (int i = 1; i < m; ++i) {
int[] g = new int[n];
Arrays.fill(g, inf);
for (int j = 0; j < n; ++j) {
for (int k = 0; k < n; ++k) {
g[j] = Math.min(g[j], f[k] + moveCost[grid[i - 1][k]][j] + grid[i][j]);
}
}
f = g;
}
// return Arrays.stream(f).min().getAsInt();
int ans = inf;
for (int v : f) {
ans = Math.min(ans, v);
}
return ans;
}
}class Solution {
public:
int minPathCost(vector<vector<int>>& grid, vector<vector<int>>& moveCost) {
int m = grid.size(), n = grid[0].size();
const int inf = 1 << 30;
vector<int> f = grid[0];
for (int i = 1; i < m; ++i) {
vector<int> g(n, inf);
for (int j = 0; j < n; ++j) {
for (int k = 0; k < n; ++k) {
g[j] = min(g[j], f[k] + moveCost[grid[i - 1][k]][j] + grid[i][j]);
}
}
f = move(g);
}
return *min_element(f.begin(), f.end());
}
};func minPathCost(grid [][]int, moveCost [][]int) int {
m, n := len(grid), len(grid[0])
const inf = 1 << 30
f := grid[0]
for i := 1; i < m; i++ {
g := make([]int, n)
for j := 0; j < n; j++ {
g[j] = inf
for k := 0; k < n; k++ {
g[j] = min(g[j], f[k]+moveCost[grid[i-1][k]][j]+grid[i][j])
}
}
f = g
}
ans := inf
for _, v := range f {
ans = min(ans, v)
}
return ans
}
func min(a, b int) int {
if a < b {
return a
}
return b
}impl Solution {
pub fn min_path_cost(grid: Vec<Vec<i32>>, move_cost: Vec<Vec<i32>>) -> i32 {
let (m, n) = (grid.len(), grid[0].len());
let mut dp = vec![0; n];
for i in 0..m - 1 {
let mut counter = vec![i32::MAX; n];
for j in 0..n {
let val = grid[i][j];
for k in 0..n {
counter[k] = counter[k].min(val + move_cost[val as usize][k] + dp[j]);
}
}
for j in 0..n {
dp[j] = counter[j];
}
}
let mut res = i32::MAX;
for i in 0..n {
res = res.min(dp[i] + grid[m - 1][i]);
}
res
}
}function minPathCost(grid: number[][], moveCost: number[][]): number {
const m = grid.length,
n = grid[0].length;
let pre = grid[0].slice();
for (let i = 1; i < m; i++) {
let next = new Array(n);
for (let j = 0; j < n; j++) {
const key = grid[i - 1][j];
for (let k = 0; k < n; k++) {
let sum = pre[j] + moveCost[key][k] + grid[i][k];
if (j == 0 || next[k] > sum) {
next[k] = sum;
}
}
}
pre = next;
}
return Math.min(...pre);
}