 +
+
+
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+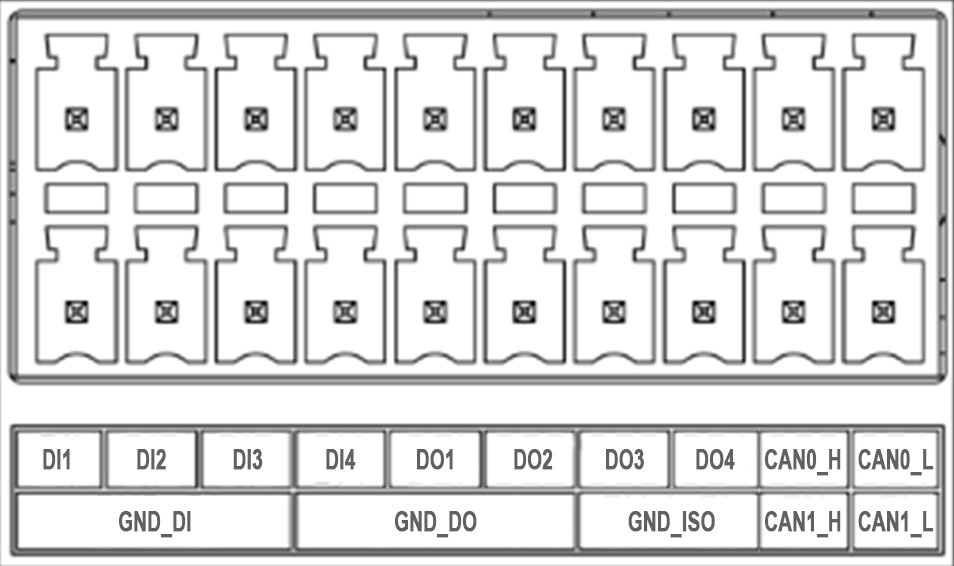 +
+| Type | +Label Name | +Schematic Signal | +Module Pin Number | +BGA Number | +GPIO Number | +V/A Limits | +
|---|---|---|---|---|---|---|
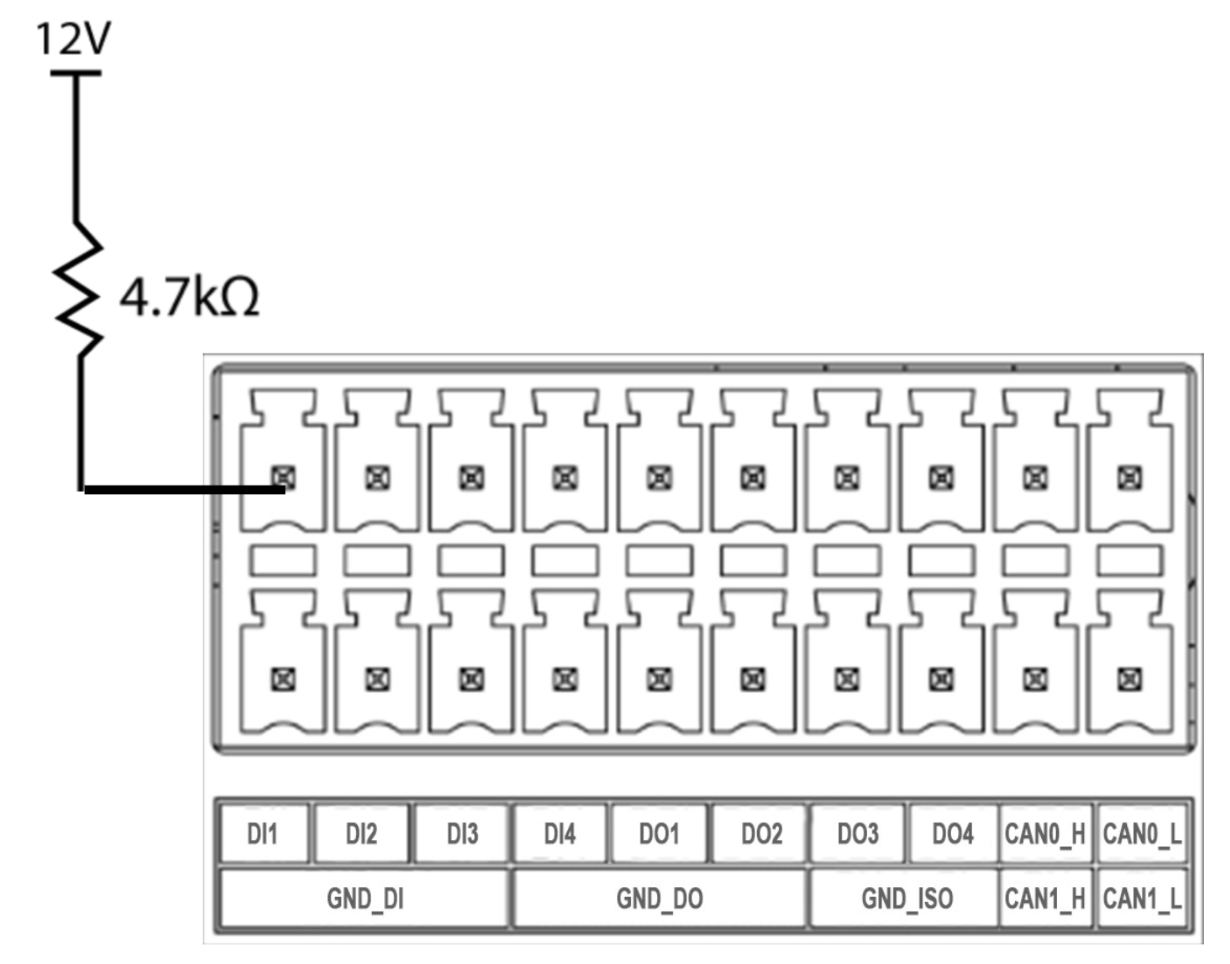
| Input | +DI1 | +DI_12V_1/DI_1_GPIO17 | +A54 | +PP.04 | +444 | +12V/ 20mA current in total | +
| DI2 | +DI_12V_2/DI_2_GPIO18 | +C55 | +PQ.04 | +452 | +||
| DI3 | +DI_12V_3/DI_3_GPIO19 | +K56 | +PN.02 | +434 | +||
| DI4 | +DI_12V_4/DI_4_GPIO33 | +C54 | +PM.07 | +431 | +||
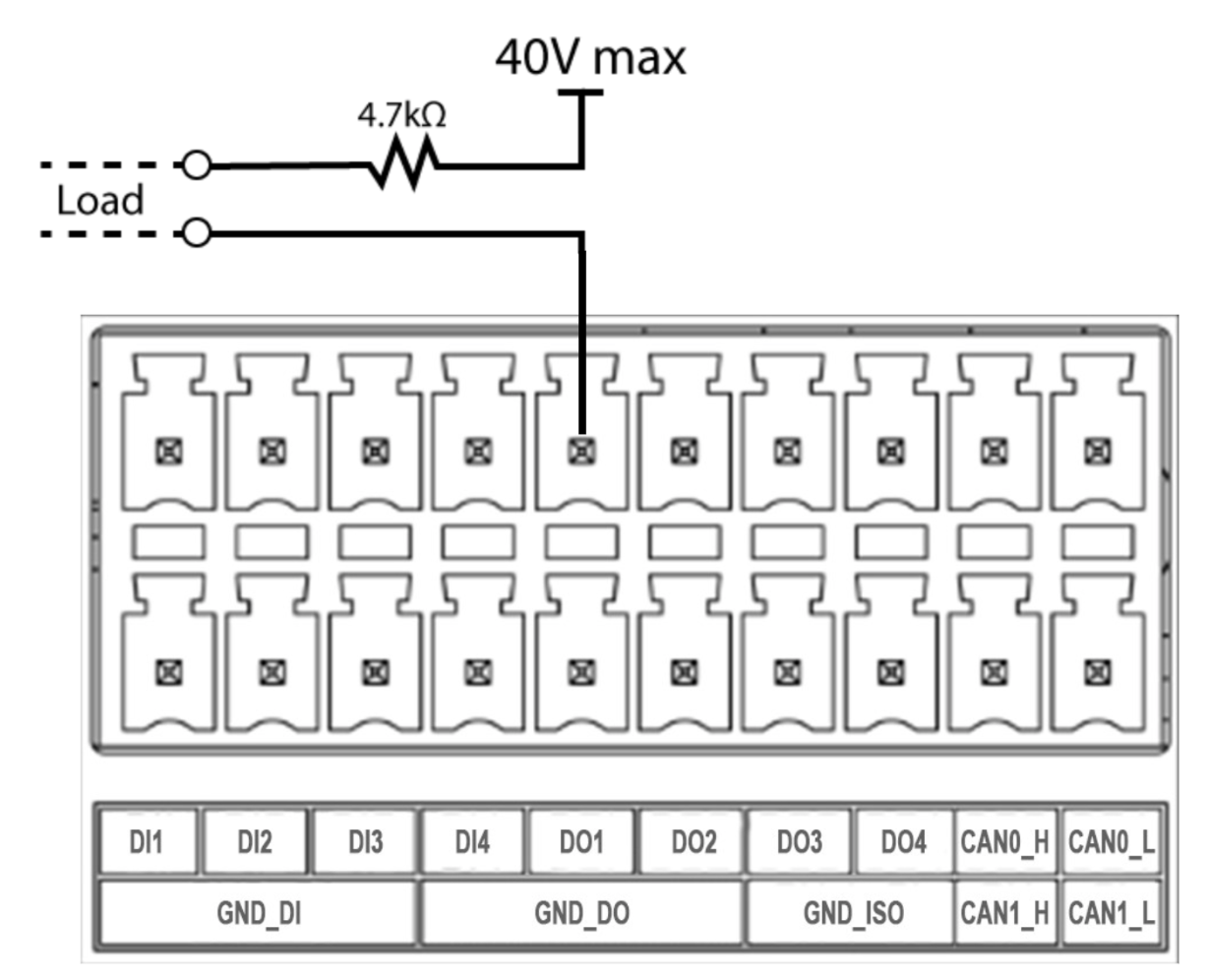
| Output | +DO1 | +DO_40V_1/DI_1_GPIO | +E59 | +PAA.04 | +320 | +40V/40mA load per pin | +
| DO2 | +DO_40V_2/DI_2_GPIO | +F59 | +PAA.07 | +323 | +||
| DO3 | +DO_40V_3/DI_3_GPIO | +B62 | +PBB.01 | +325 | +||
| DO4 | +DO_40V_4/DI_4_GPIO | +C61 | +PBB.00 | +324 | +
 +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+