-
+
+
+
+
+
+ | Light Sensor |
+ Buzzer |
+
+ |
+
+ | This wiki demonstrates how to use the built-in light sensor as a component in Wio Terminal. The light sensor uses Analog interface and you can simply read the surrounding Light sensor values via reading its pin. |
+ This wiki demonstrates how to use the built-in piezo buzzer as a component in Wio Terminal. The piezo can be connected to an analog pulse-width modulation(PWM) output to generate various tones and effects! |
+
+ |
+
+ |
+ |
+
+
-## Kit with courses by Wio Terminal
-
-
-
-
Courses with Wio Terminal
-
What is TinyML
-
-
Applications Kit ML101 with Prof. Vijay Course
-
-
Introduction to Artificial Intelligence for Makers
-
+
+## Extension Board
+
+
+
+
+
+
+ | Wio Terminal Chassis Battery(650mAh) |
+ Wio Terminal LoRaWan Chassis with Antenna-built-in LoRa-E5 and GNSS, EU868/US915
+ |
+
+ |
+
+ |
+ |
+
+ |
+
+ | The Wio Terminal Battery Chassis is a must-have extension board for Wio-Terminal Dev Board as it provides an external power source for Wio Terminal to enhance its portability and compactness. |
+ Wio Terminal LoRaWan Chassis with Antenna-built-in LoRa-E5 and GNSS, EU868/US915 embedded with LoRa-E5 STM32WLE5JC, powered by ARM Cortex M4 ultra-low-power MCU core and LoRa SX126x, is a wireless radio module supporting LoRa and LoRaWAN protocol on the EU868 & US915 frequency and (G)FSK, BPSK, (G)MSK, LoRa modulations. |
+
+ |
+
+ |
+ |
+
+
+
+
+
+
+
+
+
+ | Ethernet Connection |
+ Audio Extension Board |
+
+ |
+
+ |
+ |
+
+ |
+
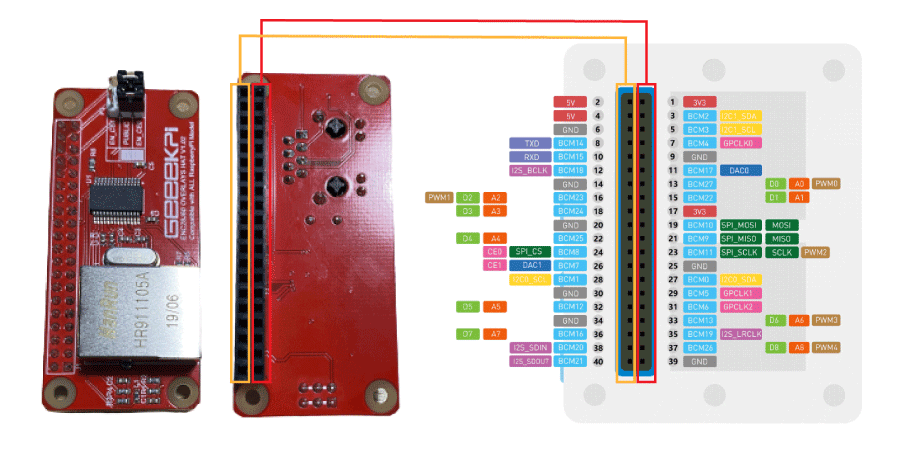
+ | This wiki introduces how to use the ENC28J60 OVERLAYS HAT for Raspberry Pi on Wio Terminal for stable network connectivity. This is a perfect example of using Raspberry Pi 40 Pi extensions board on Wio Terminal. |
+ This wiki introduces how to use the Audio library with Wio Terminal using ReSpeaker 2-Mic Hat. With the help of this library, you are able to record, play and analysis audio using Wio Terminal! Furthermore, this audio library can be implemented into different areas such as Speech recognition and much more! |
+
+ |
+
+ |
+ |
+
+
+
+
+## Kit with Courses
+
+
+
+
+
+
+ | Applications Kit ML101 with Prof. Vijay Course |
+ What is TinyML? |
+ Introduction to Artificial Intelligence for Makers |
+
+ |
+
+ |
+ |
+ |
+
+ |
+
+ | This book is designed specifically for educators to be able to adopt the Wio Terminal into the classroom or workshops to show learners the power of TinyML. It provides the basic underpinnings that one would have to cover to teach the very basics of ML while keeping the concepts grounded in hands-on exercises. |
+ ML as you might have guessed stands for Machine Learning and in most of cases (not always though) nowadays refers to Deep Learning. Tiny in TinyML means that the ML models are optimized to run on very low-power and small footprint devices, such as various MCUs. It is a subset of ML on the Edge or Embedded Machine Learning. |
+ The purpose of this article to build interest and provide a general understanding for makers who want to start their deep learning journey. I will point some of the common use cases and potential pitfalls. Also at the end of this article, I'll recommend some courses and books to learn more about this topic. |
+
+ |
+
+ |
+ |
+ |
+
+
+
+
+
+## Application
+
+### Easy IoT
+
+
+
+
+
+
+ | Connect Wio Terminal to Microsoft Azure IoT Central |
+ Connecting the Wio Terminal to Microsoft Azure IoT |
+
+ |
+
+ |
+ |
+
+ |
+
+ | In this tutorial, we will walk you through the process of connecting the Wio Terminal to Microsoft Azure IoT Central and send telemetry data from the onboard sensors/ hardware on the Wio Terminal such as the 3-axis accelerometer, light sensor, 3 buttons to Microsoft Azure IoT Central. |
+ This sample application shows you how to connect your Wio Terminal to Azure IoT Hub. It is built on top of the Azure SDK for Embedded C, a small footprint, easy-to-port library for communicating with Azure services. |
+
+ |
+
+ |
+ |
+
+
+
+
+
+
+
+
+
+ | Connect Wio Terminal to Google Cloud IoT Core |
+ Get Started with Wio Terminal and Wappsto IoT |
+
+ |
+
+ |
+ |
+
+ |
+
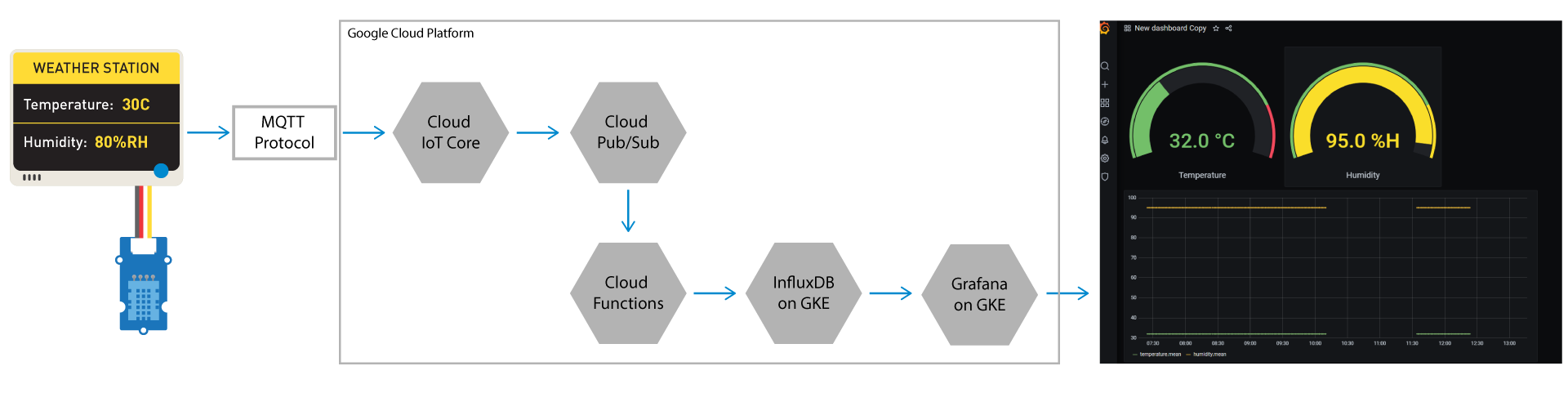
+ | In this tutorial, we will walk you through the process of connecting the Wio Terminal to Google Cloud IoT Core and send telemetry data from the Wio Terminal to the Google Cloud IoT core. |
+ In this tutorial, we will guide you through connecting the Wio Terminal to Wappsto IoT and using the various features of Wappsto after the connection. |
+
+ |
+
+ |
+ |
+
+
-## Tutorials and Projects
-
-
-
-
-
How to play retro games on Wio Terminal
-
-
USB Host for a
-
Keyboard,
-
Mouse,
-
Xbox
-
-
USB Client for a
-
Keyboard,
-
Mouse,
-
MIDI,
-
HMI
-
-
How to display Gyro on Wio Terminal
-
-
How to use Wio Terminal to store data
-
-
How to use Wio Terminal to display photos
-
+### Embedded ML
+
+
+
+
+
+
+ | Projects based Edge Impulse |
+ Projects based TensorFlow Lite |
+ LoRa Node with AIoTs GPS |
+
+ |
+
+ |
+ |
+ |
+
+ |
+
+ | Edge Impulse enables developers to create the next generation of intelligent device solutions with embedded Machine Learning. Machine Learning at the very edge will enable valuable use of the 99% of sensor data that is discarded today due to cost, bandwidth or power constraints.
+ Now, Wio Terminal is officially supported by the Edge Impulse. Let's see how to get Wio Terminal started with the Machine learning at the very edge! |
+ This article introduces how to install the official Arduino Tensorflow Lite library into your Wio Terminal, allowing you to test out some Machine Learning models using Wio Terminal. |
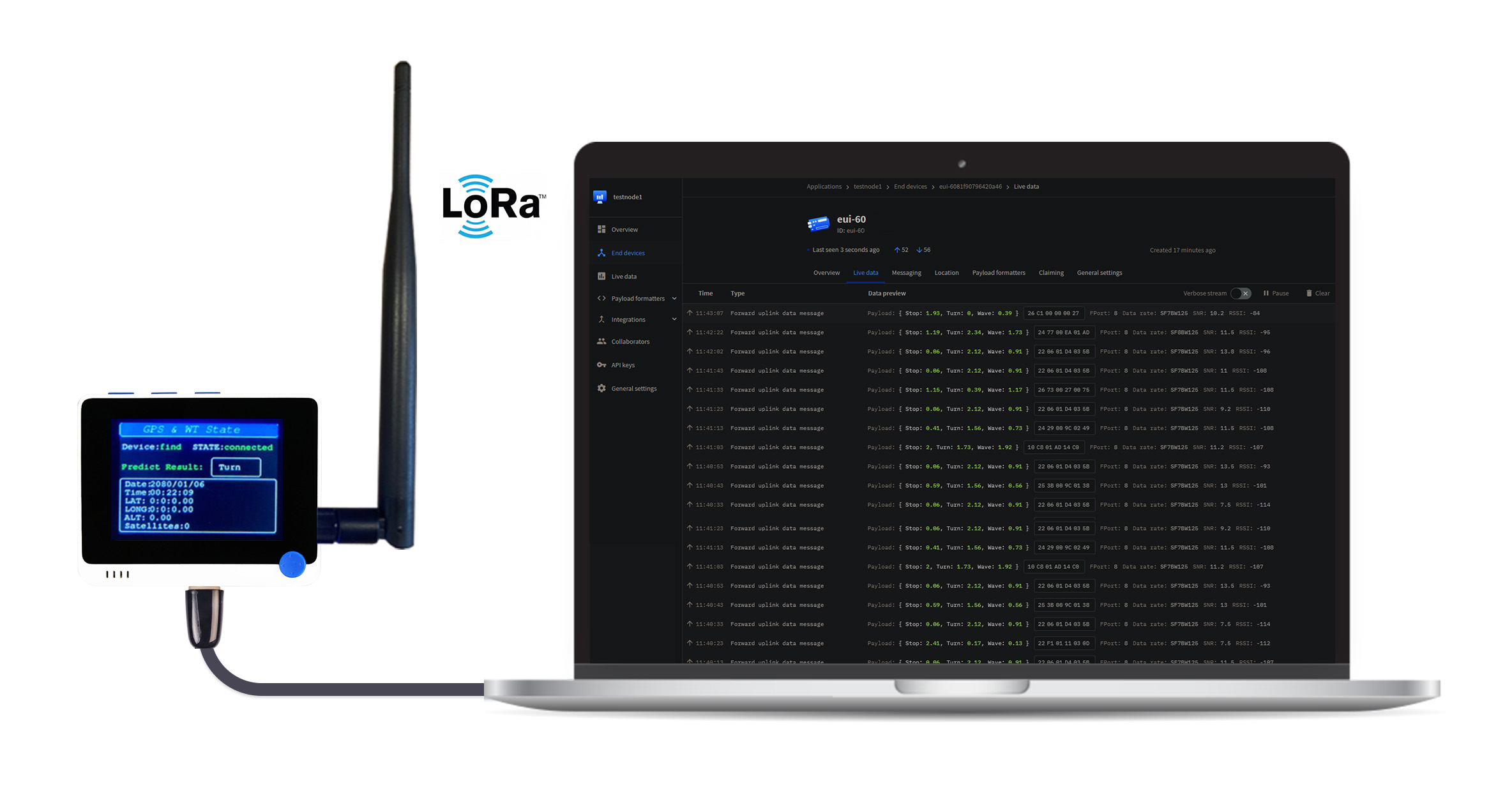
+ In this project, it will be used a built-in 3 axis accelerometer sensor and the neural network algorithm to build up an intelligent recognition system. Based on the movement of Wio Terminal, it can show you its state in real-time. |
+
+ |
+
+ |
+ |
+ |
+
+
-
+
+
+
+
+
+
+ | Storing Data |
+ Displaying Photos |
+ Interactive Faces Demo |
+
+ |
+
+ |
+ |
+ |
+
+ |
+
+ | This example demonstrates using the line graph functions to display the Grove - Light sensor reading on Wio Terminal, just like the Serial Plotter! To add more, the light sensor data are stored in the SD Card. |
+ This example demonstrates how to display images from SD card in loop. |
+ This example demonstrates how to display multiple images (eyes) onto the LCD screen through SD card (BMP format), and with the use of the built-in buttons and gyroscope to interact with users. |
+
+ |
+
+ |
+ |
+ |
+
+
+
+
+### Project
+
+
+
+
+
+
+ | Pressure sensor using the Wio Terminal |
+ Reading Coronavirus Live Data using Wio Terminal |
+ Build a IR Thermal Imaging Camera using Wio Terminal |
+
+ |
+
+ |
+ |
+ |
+
+ |
+
+ | The demo shows that the Grove- high precision pressure sensor DPS310 is fully compatible with the Wio terminal, and its measurement has high precision. |
+ This wiki is a modification of Reading Github Repository Stats from Wio Terminal, where it is modified to access to Coronavirus COVID19 API and parse the data and display Live COVID-19 data on the LCD screen. |
+ With Grove - Infrared Temperature Sensor Array (AMG8833) and Wio Terminal, we can build a low cost FLIR™ like Thermal Imagining camera with ease! |
+
+ |
+
+ |
+ |
+ |
+
+
+
+
+
+
+
+
+
+ | Build a HMI Display for Raspberry Pi |
+ How to measure noise levels with Wio Terminal |
+ Accessing to GitHub using Wio Terminal |
+
+ |
+
+ |
+ |
+ |
+
+ |
+
+ | In this wiki, we will introduce how to use Wio Terminal as a HMI (Human Machine Interface) USB display for Raspberry Pi, Nvidia Jetson Nano, BeagleBone and even Odyssey X86J4105. |
+ This example detects dB using the mic on ReSpeaker 2-Mic Hat, The around evirnment is detected, then displayed on the display. |
+ This wiki introduces how to use Wio Terminal to access to HTTPS server, which means you could use Wio Terminal to grab live data from the internet! Here, Wio Terminal is connected to a Wi-Fi and obtain data from the Github. |
+
+ |
+
+ |
+ |
+ |
+
+
+
+
+
+
+
+
+
+ | Blynk for Wio Terminal |
+ Edge Impulse Tuner |
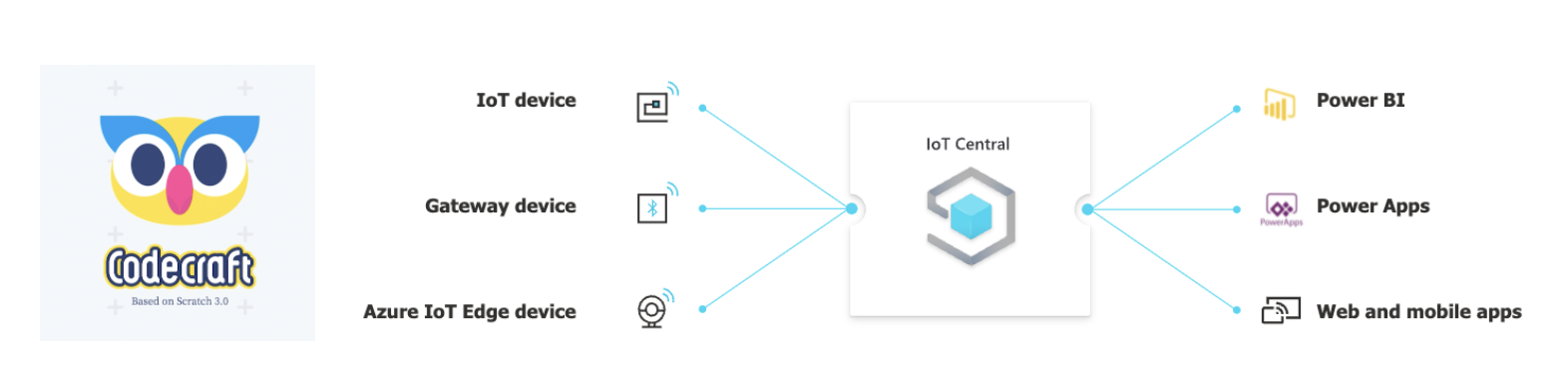
+ Codecraft connecting Azure IoT with Wio Terminal |
+
+ |
+
+ |
+ |
+ |
+
+ |
+
+ | This wiki introduces how to use the Wio Terminal with the Blynk software to interact with Wi-Fi or Bluetooth. This allows you to use Wio Terminal as the core of an IoT device and able to control hardware from phones very easily! |
+ Here we gonna provide the audio classification project and show you the usage of EON Tuner. If you are interested in Using LoRa to transmit data based on Wio Terminal and Edge Impulse, you can always click and see the example project. |
+ Here we gonna show you how to connect Codecraft with Azure IoT based on Wio Terminal and apply sensors to IoT projects. |
+
+ |
+
+ |
+ |
+ |
+
+
+
+
+
## ✨ Contributor Project
From c217d679c2b7f9a7e359a131b58a1adb63543ffc Mon Sep 17 00:00:00 2001
From: ZhuYaoHui1998 <510677932@qq.com>
Date: Wed, 7 Aug 2024 13:38:00 +0800
Subject: [PATCH 15/23] fixed download link of reComputer and reServer BSP
packages
---
.../A203v2/reComputer_A203_Flash_System.md | 4 +++-
.../J401/reComputer_J4012_Flash_Jetpack.md | 13 ++++--------
.../reComputer_Industrial_Getting_Started.md | 16 ++++++--------
.../reServer_Industrial_Getting_Started.md | 21 +++++++------------
4 files changed, 21 insertions(+), 33 deletions(-)
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md
index ea1974138836..ddfa819be407 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A203v2/reComputer_A203_Flash_System.md
@@ -456,8 +456,10 @@ After we unzip the package, we need to install the driver as well to make sure e
-!!!Note
+:::note
+
There are two JetPack 5.0.2 drivers for A203 included in the downloaded files. Both work fine, except that one of them supports **IMX-219 camera** and the other one supports **IMX-477 camera**.
+:::
### Step 4. Unzip the Driver in the file
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/J401/reComputer_J4012_Flash_Jetpack.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/J401/reComputer_J4012_Flash_Jetpack.md
index 2fd42397ae41..65e1f5798963 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/J401/reComputer_J4012_Flash_Jetpack.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/J401/reComputer_J4012_Flash_Jetpack.md
@@ -456,31 +456,26 @@ Here we will use NVIDIA L4T 36.3 to install Jetpack 6.0 on the reComputer
| Jetson Orin NX 16GB |
- Download |
+ Download |
6.0 |
36.3 |
| Jetson Orin NX 8GB |
- Download |
+ Download |
| Jetson Orin Nano 8GB |
- Download |
+ Download |
| Jetson Orin Nano 4GB |
- Download |
+ Download |
-:::caution
-
-Due to server maintenance aimed at better serving everyone, the download of BSP image files is temporarily unavailable. We sincerely apologize for the inconvenience and will restore the service as soon as possible.
-
-:::
**Step 2:** Extract the downloaded image file:
```bash
diff --git a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_Industrial/reComputer_Industrial_Getting_Started.md b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_Industrial/reComputer_Industrial_Getting_Started.md
index 00652f4697bc..89f4219f72ef 100644
--- a/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_Industrial/reComputer_Industrial_Getting_Started.md
+++ b/docs/Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_Industrial/reComputer_Industrial_Getting_Started.md
@@ -315,38 +315,34 @@ The first method download is around 14GB and the second method download is about
| reComputer Industrial J4012 |
- Download |
+ Download |
5.1.1 |
35.3.1 |
| reComputer Industrial J4011 |
- Download |
+ Download |
| reComputer Industrial J3011 |
- Download |
+ Download |
| reComputer Industrial J3010 |
- Download |
+ Download |
| reComputer Industrial J2012 |
- Download |
+ Download |
| reComputer Industrial J2011 |
- Download |
+ Download |
-:::caution
-Due to server maintenance aimed at better serving everyone, the download of BSP image files is temporarily unavailable. We sincerely apologize for the inconvenience and will restore the service as soon as possible.
-
-:::
The source code for the above images can be found [here](https://github.com/Seeed-Studio/Linux_for_Tegra)
diff --git a/docs/Edge/NVIDIA_Jetson/reServer_Jetson_Series/reServer_Industrial_J30_J40/reServer_Industrial_Getting_Started.md b/docs/Edge/NVIDIA_Jetson/reServer_Jetson_Series/reServer_Industrial_J30_J40/reServer_Industrial_Getting_Started.md
index 7a0e53309e0f..c031d4802ec5 100644
--- a/docs/Edge/NVIDIA_Jetson/reServer_Jetson_Series/reServer_Industrial_J30_J40/reServer_Industrial_Getting_Started.md
+++ b/docs/Edge/NVIDIA_Jetson/reServer_Jetson_Series/reServer_Industrial_J30_J40/reServer_Industrial_Getting_Started.md
@@ -313,14 +313,14 @@ import TabItem from '@theme/TabItem';
5.1.1 |
35.3.1 |
- Download
+ Download
|
| 6.0 |
36.3 |
- Download
+ Download
|
@@ -328,14 +328,14 @@ import TabItem from '@theme/TabItem';
| 5.1.1 |
35.3.1 |
- Download
+ Download
|
| 6.0 |
36.3 |
- Download
+ Download
|
@@ -343,14 +343,14 @@ import TabItem from '@theme/TabItem';
| 5.1.1 |
35.3.1 |
- Download
+ Download
|
| 6.0 |
36.3 |
- Download
+ Download
|
@@ -358,25 +358,20 @@ import TabItem from '@theme/TabItem';
| 5.1.1 |
35.3.1 |
- Download
+ Download
|
| 6.0 |
36.3 |
- Download
+ Download
|
-:::caution
-
-Due to server maintenance aimed at better serving everyone, the download of BSP image files is temporarily unavailable. We sincerely apologize for the inconvenience and will restore the service as soon as possible.
-
-:::
From 1ff5cd5d409656655840fd67a39a76194b98eaad Mon Sep 17 00:00:00 2001
From: ZhuYaoHui1998 <510677932@qq.com>
Date: Wed, 7 Aug 2024 13:57:29 +0800
Subject: [PATCH 16/23] fixed download link of reComputer and reServer BSP
packages
---
.../Carrier_Boards/A603/A603_Flash_JetPack.md | 9 ++-------
.../Carrier_Boards/A607/A607_Flash_JetPack.md | 12 +++---------
.../Carrier_Boards/A608/A608_Flash_JetPack.md | 17 +++++------------
3 files changed, 10 insertions(+), 28 deletions(-)
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
index 255ea1bee9fa..408c55bad2b7 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
@@ -110,24 +110,19 @@ First of all, you need to install the peripheral drivers for this board. These a
Jetson Orin NX 8GB/ 16GB,
Jetson Orin Nano 4GB/ 8GB |
5.1.2 |
35.4.1 |
-
Download |
+
Download |
Jetson Orin NX 8GB/ 16GB,
Jetson Orin Nano 4GB/ 8GB |
6.0 |
36.3 |
- Download |
+ Download |
-:::caution
-
-Due to server maintenance aimed at better serving everyone, the download of BSP image files is temporarily unavailable. We sincerely apologize for the inconvenience and will restore the service as soon as possible.
-
-:::
**Note:** Currently we provide the above drivers. We will keep updating the drivers in the future with the release of new JetPack versions.
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A607/A607_Flash_JetPack.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A607/A607_Flash_JetPack.md
index b7b9346ba5e3..1f0e960cba39 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A607/A607_Flash_JetPack.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A607/A607_Flash_JetPack.md
@@ -82,7 +82,7 @@ First of all, you need to install the peripheral drivers for this board. These a
| 6.0 |
36.3 |
- Download |
+ Download |
| Jetson Orin Nano 4GB |
@@ -93,7 +93,7 @@ First of all, you need to install the peripheral drivers for this board. These a
| 6.0 |
36.3 |
- Download |
+ Download |
| Jetson Orin Nano 8GB |
@@ -104,18 +104,12 @@ First of all, you need to install the peripheral drivers for this board. These a
| 6.0 |
36.3 |
- Download |
+ Download |
-:::caution
-
-Due to server maintenance aimed at better serving everyone, the download of BSP image files is temporarily unavailable. We sincerely apologize for the inconvenience and will restore the service as soon as possible.
-
-:::
-
**Note:** Currently we provide the above drivers. We will keep updating the drivers in the future with the release of new JetPack versions.
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A608/A608_Flash_JetPack.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A608/A608_Flash_JetPack.md
index f85aecf05ea8..7ea84faa74c1 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A608/A608_Flash_JetPack.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A608/A608_Flash_JetPack.md
@@ -72,13 +72,9 @@ Here we will use NVIDIA L4T 35.3.1 to install Jetpack 5.1.1 on the A608 Carrier
-**Step 2.** [Download](https://nv-jetson-images.oss-us-west-1.aliyuncs.com/A608/a608_jp511.tar.gz?OSSAccessKeyId=LTAI5tKm7UD2hmuFW85cz42T&Expires=4861269491&Signature=801mYzDJxj5g68Vqo2H4k7VVLkM%3D) peripheral drivers and put all the drivers in same folder.
+**Step 2.** [Download](http://recomputer-jetson.oss-us-west-1.aliyuncs.com/A608/608_jp511.zip) peripheral drivers and put all the drivers in same folder.
-:::caution
-Due to server maintenance aimed at better serving everyone, the download of BSP image files is temporarily unavailable. We sincerely apologize for the inconvenience and will restore the service as soon as possible.
-
-:::
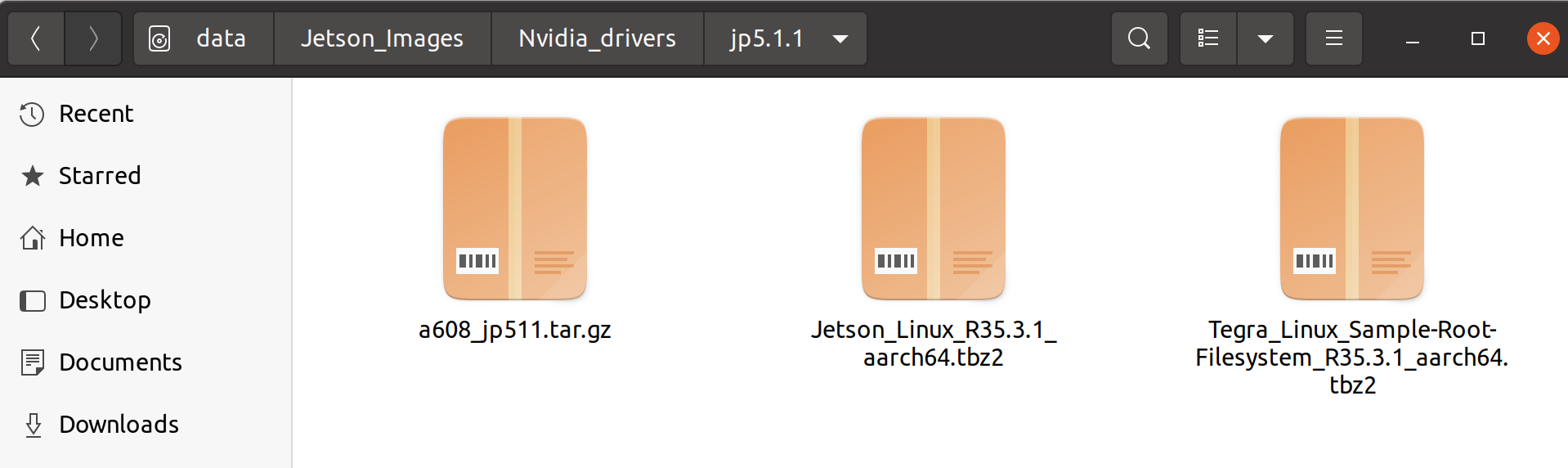
Now you will see three compressed files in the same folder:
@@ -98,7 +94,9 @@ cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
cd ..
-tar -zxvf a608_jp511.tar.gz
+unzip 608_jp511.zip
+cp -r ./608_jp511/Linux_for_Tegra/* ./Linux_for_Tegra/
+
```
**Step 4.** Flash the system to A608.
@@ -134,13 +132,8 @@ Here we will use NVIDIA L4T 35.4.1 to install Jetpack 5.1.2 on the A608 Carrier
**Step 1.** [Download](https://developer.nvidia.com/embedded/jetson-linux-r3541) the NVIDIA drivers on the host PC. The required drivers are shown below:
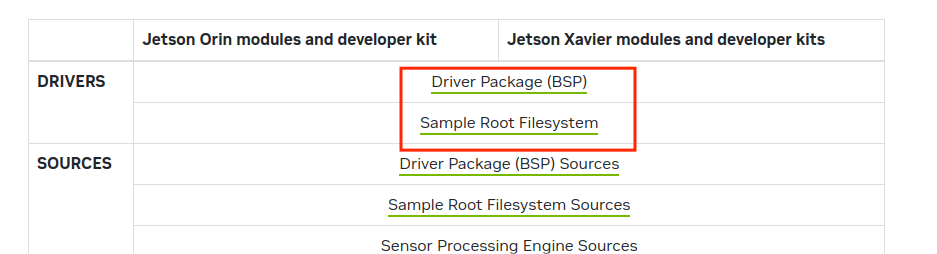
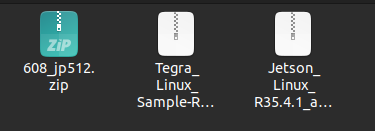
-**Step 2.** [Download](https://nv-jetson-images.oss-us-west-1.aliyuncs.com/A608/608_jp512.zip?OSSAccessKeyId=LTAI5tKm7UD2hmuFW85cz42T&Expires=4866749054&Signature=GavBxI%2Fe6tSG%2BTKECy4NNQ%2BtI7g%3D) peripheral drivers and put all the drivers in same folder.
-
-:::caution
-
-Due to server maintenance aimed at better serving everyone, the download of BSP image files is temporarily unavailable. We sincerely apologize for the inconvenience and will restore the service as soon as possible.
+**Step 2.** [Download](http://recomputer-jetson.oss-us-west-1.aliyuncs.com/A608/608_jp512.zip) peripheral drivers and put all the drivers in same folder.
-:::
Now you will see three compressed files in the same folder:
From 3de2795cc0fc8e86fa8b743e7be6be7c4aaf3a3b Mon Sep 17 00:00:00 2001
From: ZhuYaoHui1998 <510677932@qq.com>
Date: Wed, 7 Aug 2024 13:58:34 +0800
Subject: [PATCH 17/23] fixed download link of reComputer and reServer BSP
packages
---
.../NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md | 4 ----
1 file changed, 4 deletions(-)
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
index 408c55bad2b7..fd62c7f359ae 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
@@ -288,10 +288,6 @@ sudo apt install unzip
unzip A603-JP5.1.2.zip
```
-:::caution
-Here it will ask whether to replace the files. Type **A** and press **ENTER** to replace the necessary files.
-:::
-
**Step 5:** Configure your username, password & hostname so that you do not need to enter the Ubuntu installation wizard after the device finishes booting.
```sh
From e6f7ea6449a73f2cc349ce8ee955fc8fcd12ad08 Mon Sep 17 00:00:00 2001
From: ZhuYaoHui1998 <510677932@qq.com>
Date: Wed, 7 Aug 2024 13:58:57 +0800
Subject: [PATCH 18/23] fixed download link of reComputer and reServer BSP
packages
---
.../NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md | 4 ----
1 file changed, 4 deletions(-)
diff --git a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
index fd62c7f359ae..70602a1d7801 100644
--- a/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
+++ b/docs/Edge/NVIDIA_Jetson/Carrier_Boards/A603/A603_Flash_JetPack.md
@@ -343,10 +343,6 @@ sudo apt install unzip
sudo unzip A603-JP6.0.zip
```
-:::caution
-Here it will ask whether to replace the files. Type **A** and press **ENTER** to replace the necessary files.
-:::
-
**Step 5:** Configure your username, password & hostname so that you do not need to enter the Ubuntu installation wizard after the device finishes booting.
```sh
From 5538c49e53b0179e0f9fbd5ee1d3e6ae0b160a40 Mon Sep 17 00:00:00 2001
From: jiahao
Date: Wed, 7 Aug 2024 16:46:30 +0800
Subject: [PATCH 19/23] add:
docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit
_with_raspberrypi5_about_yolov8n_object_detection.md
---
...and_cm4_running_yolov8s_with_rpi_ai_kit.md | 2 -
...berrypi5_about_yolov8n_object_detection.md | 320 ++++++++++++++++++
sidebars.js | 3 +-
3 files changed, 322 insertions(+), 3 deletions(-)
create mode 100644 docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md
diff --git a/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md b/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md
index 1c79ca2b9fa1..85169cc2dc5d 100644
--- a/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md
+++ b/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit.md
@@ -155,8 +155,6 @@ lspci | grep Hailo
The right result show as bellow:

-Open terminal on the reCompuer R1000, and input command as follows to run YOLOv8.
-
### Run Project
diff --git a/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md b/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md
new file mode 100644
index 000000000000..f10ccbe0268b
--- /dev/null
+++ b/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md
@@ -0,0 +1,320 @@
+---
+description: This wiki demonstrates how to use yolov8n to do object detection with ai kit on raspberry pi5 from traing to deploying
+title: Tutorial of AI Kit with Raspberry Pi 5 about YOLOv8n object detection
+keywords:
+ - Edge
+ - rpi5
+ - Ai kit
+ - YOLO
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection
+last_update:
+ date: 08/6/2024
+ author: Jiahao
+
+no_comments: false # for Disqus
+---
+
+# Tutorial of AI Kit with Raspberry Pi 5 about YOLOv8n object detection
+## Introduction
+
+[YOLOv8](https://github.com/ultralytics/ultralytics) (You Only Look Once version 8) is the popular most YOLO series of real-time pose estimation and object de tection models. It builds upon the strengths of its predecessors by introducing several advancements in speed, accuracy, and flexibility. The [Raspberry-pi-AI-kit](https://www.seeedstudio.com/Raspberry-Pi-AI-Kit-p-5900.html) is used to accelerate inference speed, featuring a 13 tera-operations per second (TOPS) neural network inference accelerator built around the Hailo-8L chip.
+
+This wiki we will show you how to use yolov8n to do object detection with ai kit on raspberry pi5 from traing to deploying.
+
+## Prepare Hardware
+
+
+
+
+ | reComputer r1000 |
+ Raspberry Pi AI Kit |
+
+
+ |
+ |
+
+
+ |
+ |
+
+
+
+
+## Host computer
+
+:::note
+We will install hailo software, make sure you have a hailo account.
+:::
+
+### Install Ultralytics and train model:
+
+Install python3.11
+```
+sudo apt install python3.11
+```
+
+Creat yolo_env as your virtual environment
+
+```
+python3.11 -m venv yolo_env
+```
+
+Activate the environment
+
+```
+source yolo_env/bin/activate
+```
+
+Install ultralytics
+
+```
+pip install ultralytics
+```
+
+Train yolov8n, here we use coco as dateset, if you want train your own dataset, you can use [this](https://docs.ultralytics.com) to train your own dataset.
+
+```
+mkdir yolomodel && cd yolomodel
+yolo detect train data=coco128.yaml model=yolov8n.pt name=retrain_yolov8n epochs=100 batch=16
+```
+
+
+
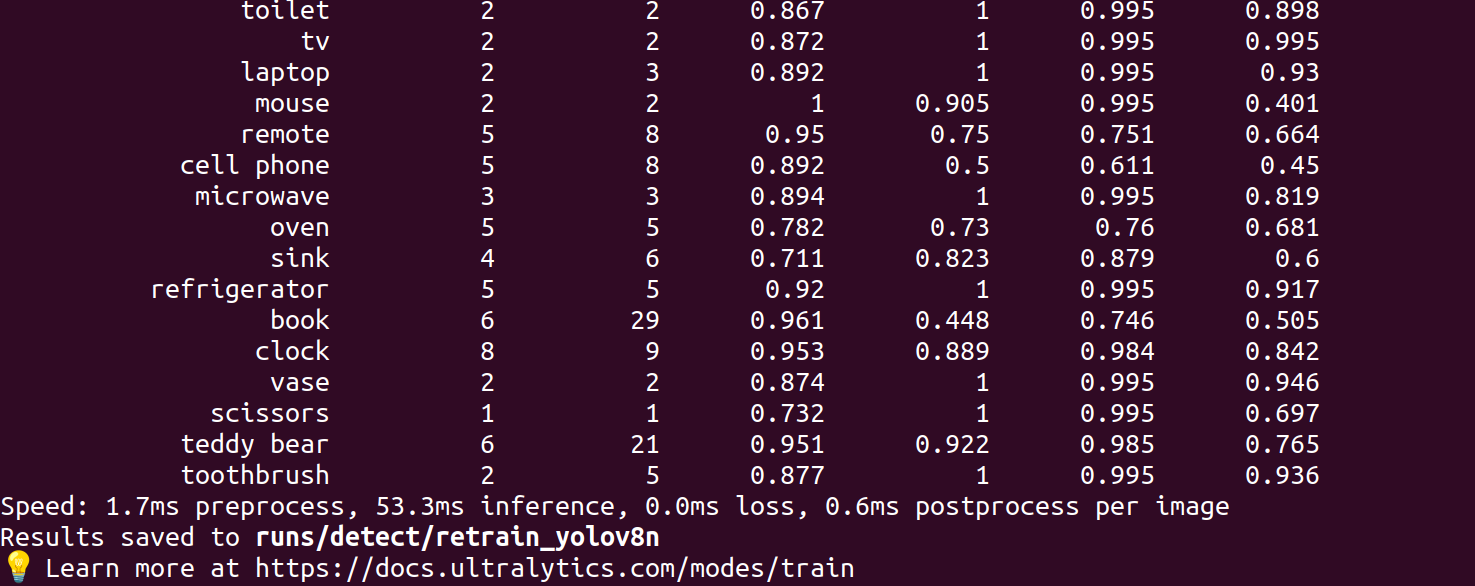
+You will get best.pt model after your training like below:
+
+```
+cd ./runs/detect/retrain_yolov8n/weights/
+ls
+```
+
+
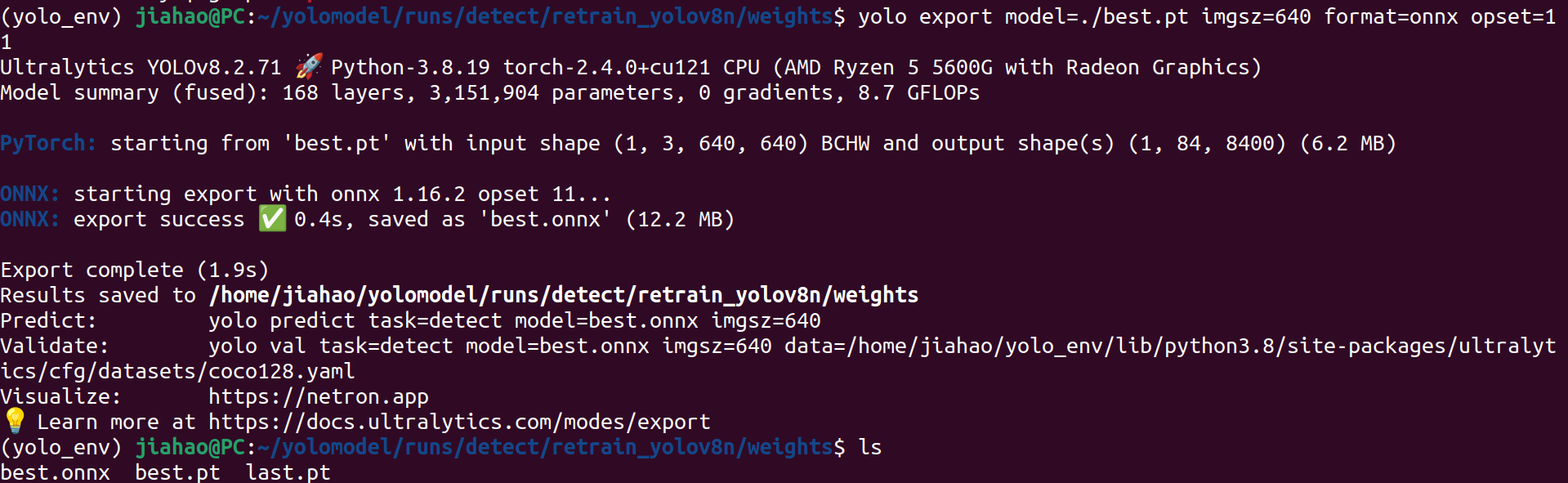
+Convert pt model to onnx
+
+```
+yolo export model=./best.pt imgsz=640 format=onnx opset=11
+```
+Result like below:
+
+
+### Install hailo software:
+
+Install python 3.8
+
+```
+cd ~
+sudo apt install python3.8
+```
+
+Creat hailo_env as your virtual environment
+
+```
+python3.8 -m venv hailo_env
+```
+
+Activate the environment
+
+```
+source hailo_env/bin/activate
+```
+
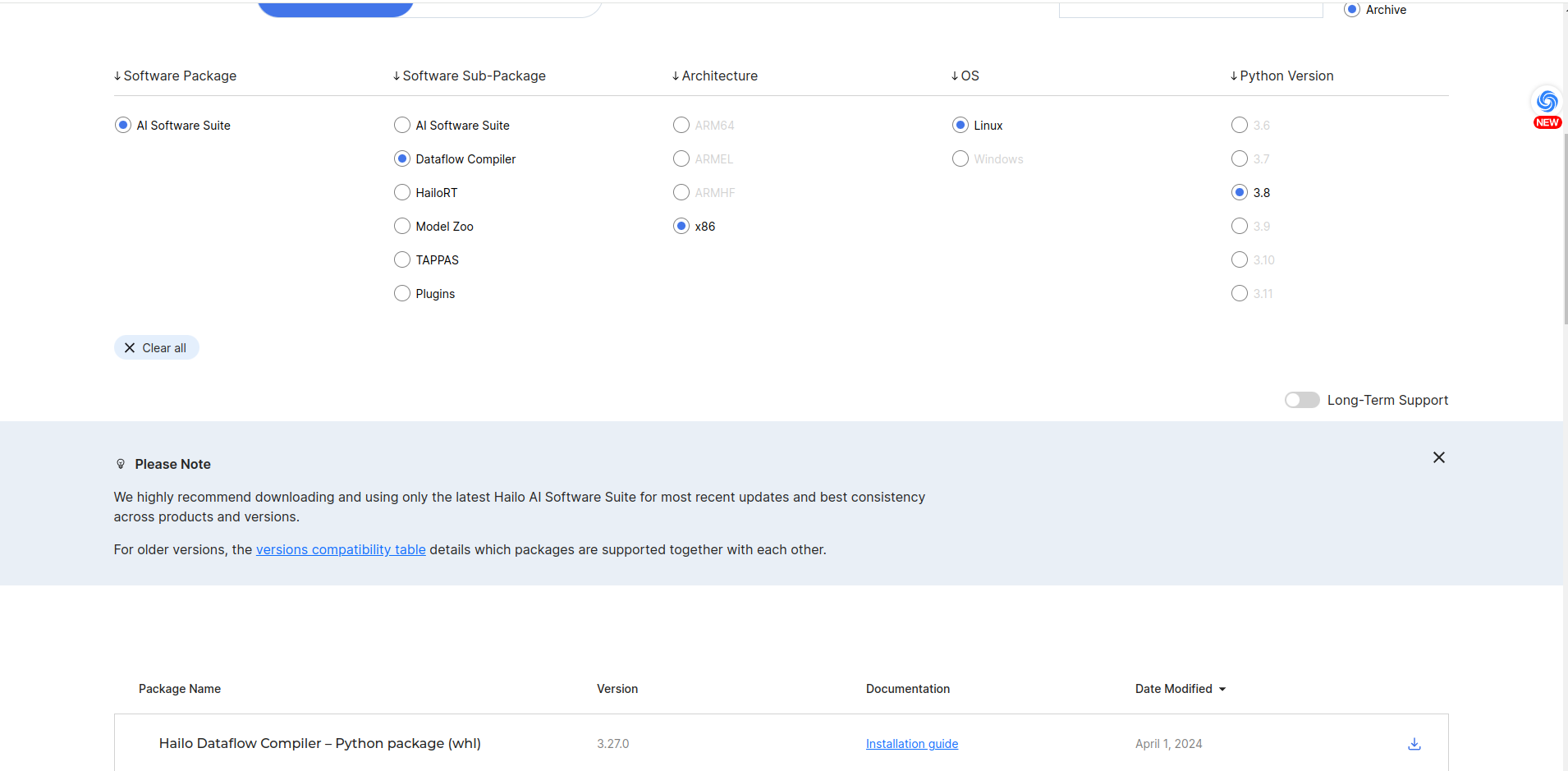
+Install [Hailo Dataflow Compiler 3.27](https://hailo.ai/developer-zone/software-downloads/), here you need to register Hailo and login, and download the software.
+
+
+
+```
+pip install hailo_dataflow_compiler-3.27.0-py3-none-linux_x86_64.whl
+
+```
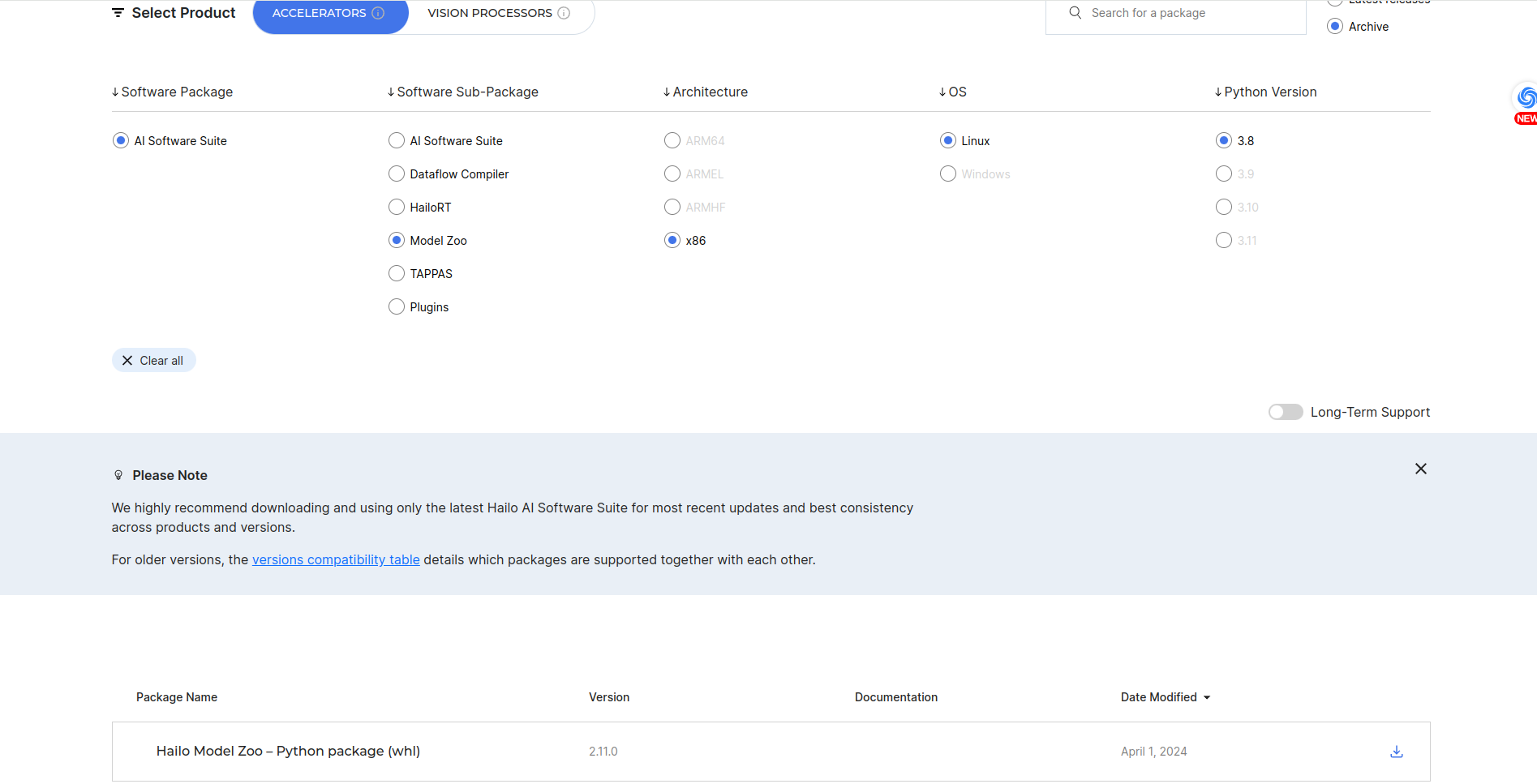
+Install [Model zoo](https://hailo.ai/developer-zone/software-downloads/), here you need to register Hailo and login, and download the software.
+
+
+
+```
+pip install hailo_model_zoo-2.11.0-py3-none-any.whl
+```
+
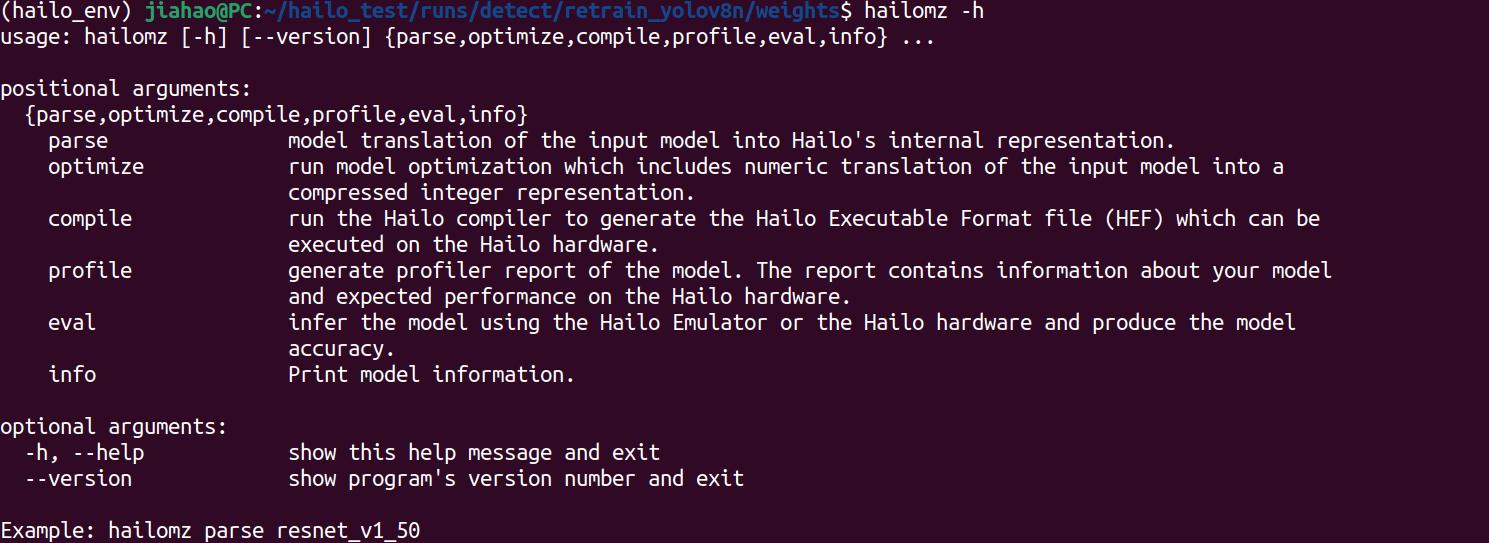
+Test hailo_model_zoo weather it can work
+
+```
+hailomz -h
+```
+
+
+
+Install hailo_model_zoo github file
+
+```
+cd yolomodel/runs/detect/retrain_yolov8n/weights
+
+git clone https://github.com/hailo-ai/hailo_model_zoo.git
+```
+
+Install coco dataset for evaluate/optimize/compile the yolov8n model
+
+```
+python hailo_model_zoo/datasets/create_coco_tfrecord.py val2017
+python hailo_model_zoo/datasets/create_coco_tfrecord.py calib2017
+```
+### Use hailomz to parse the model:
+
+Use hailomz to parse the model
+
+```
+hailomz parse --hw-arch hailo8l --ckpt ./best.onnx yolov8n
+```
+
+
+
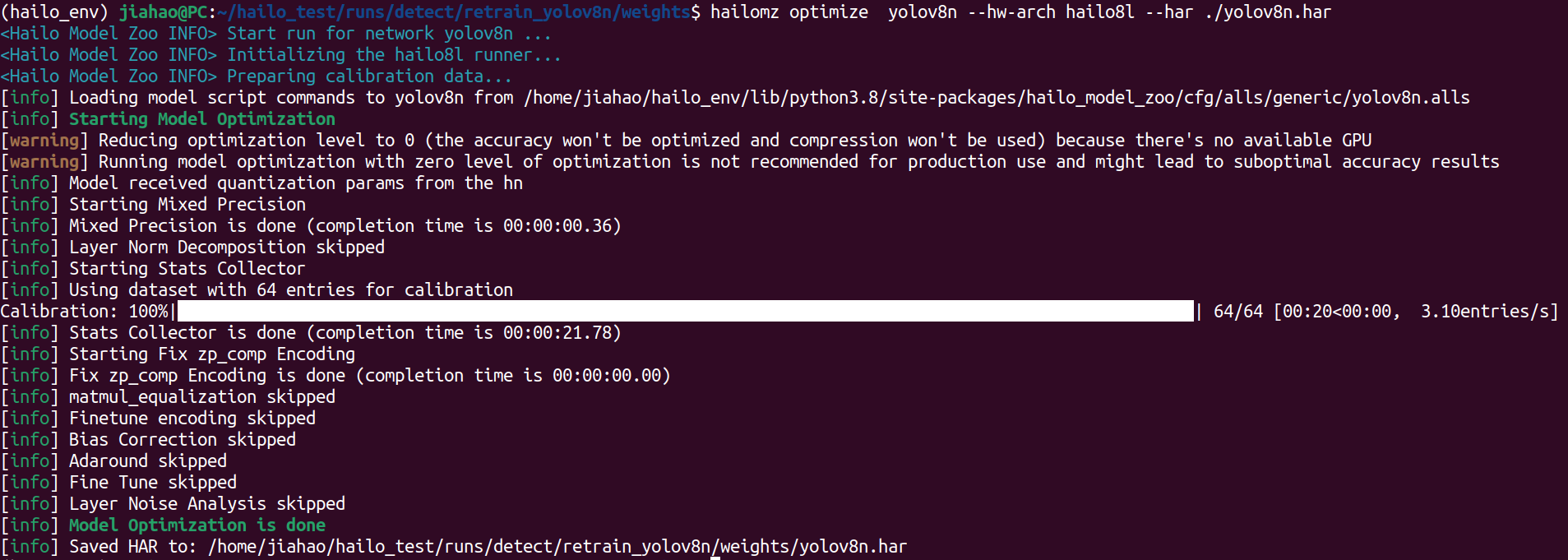
+### Use hailomz to optimize the model:
+
+:::note
+If you excute the following command, you may get some errors, but you can copy ```./hailo_model_zoo/hailo_model_zoo``` to your local library. And if the error is about not find dateset, you can enter ```~/.hailomz``` and find the dataset, and copy it to your local dataset.
+:::
+
+```
+hailomz optimize --hw-arch hailo8l --har ./yolov8n.har yolov8n
+```
+
+
+
+### Use hailomz to compile the model:
+
+```
+hailomz compile yolov8n --hw-arch hailo8l --har ./yolov8n.har
+```
+
+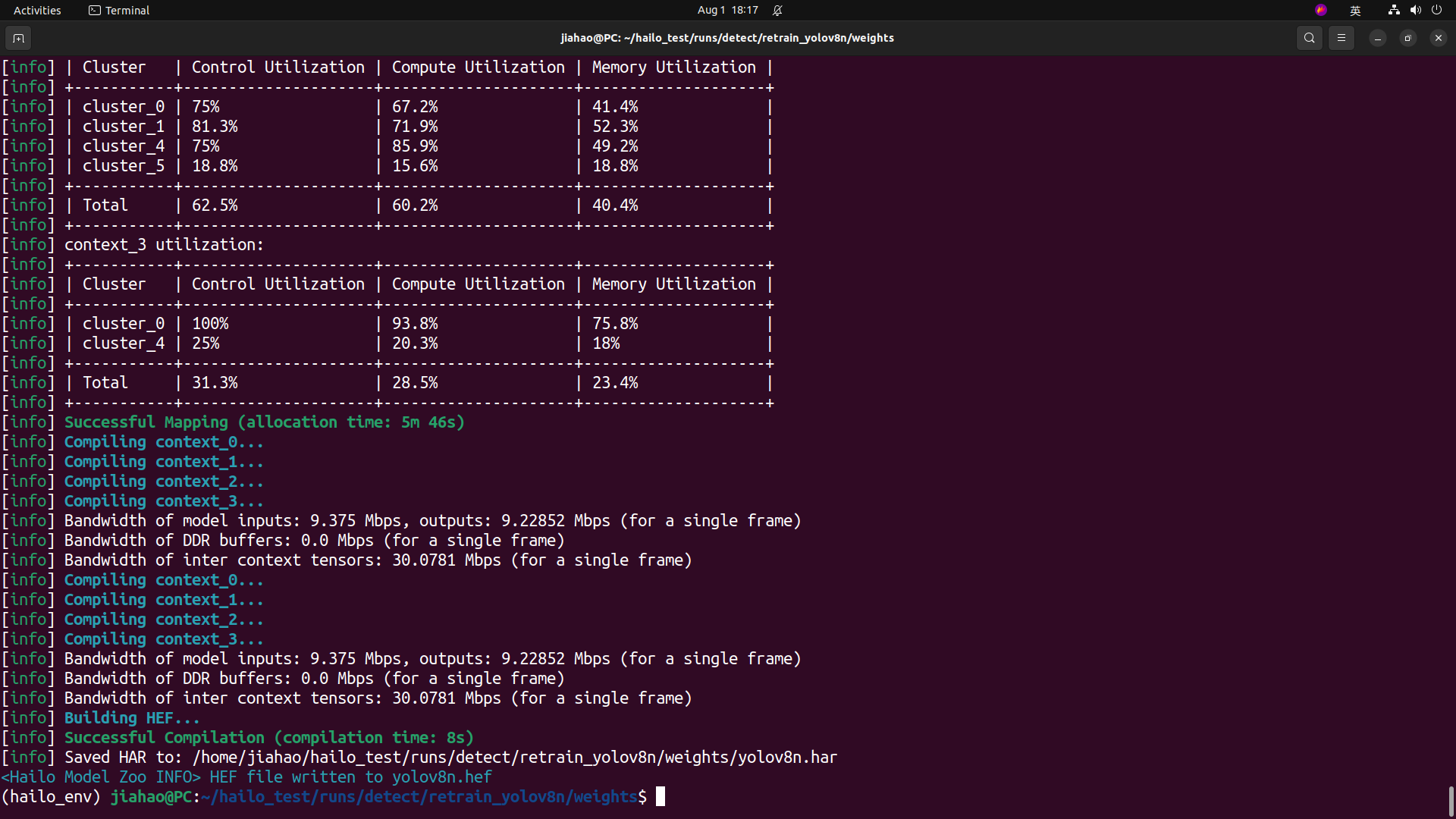
+
+After all you will get a hef format model, you can use it to deploy on reComputer r1000.
+
+```
+ls
+```
+
+
+## raspberry pi5
+
+### update the system:
+
+```
+sudo apt update
+sudo apt full-upgrade
+```
+
+### Set pcie to gen2/gen3(gen3 is faster than gen2):
+
+Add following text to ```/boot/firmware/config.txt```
+
+```
+#Enable the PCIe external connector
+
+dtparam=pciex1
+
+#Force Gen 3.0 speeds
+
+dtparam=pciex1_gen=3
+
+```
+:::note
+If you want to use gen2,please comment dtparam=pciex1_gen=3
+:::
+
+### Install hailo-all and reboot:
+
+Open terminal on the Raspberry Pi5, and input command as follows to install Hailo software.
+
+```
+sudo apt install hailo-all
+sudo reboot
+```
+### Check Software and Hardware:
+
+Open terminal on the Raspberry Pi5, and input command as follows to check if hailo-all have been installed.
+
+```
+hailortcli fw-control identify
+```
+
+The right result show as bellow:
+
+
+Open terminal on the Raspberry Pi5, and input command as follows to check if hailo-8L have been connected.
+
+```
+lspci | grep Hailo
+```
+
+The right result show as bellow:
+
+
+
+### Clone the project:
+
+```
+git clone https://github.com/Seeed-Projects/Benchmarking-YOLOv8-on-Raspberry-PI-reComputer-r1000-and-AIkit-Hailo-8L.git
+cd Benchmarking-YOLOv8-on-Raspberry-PI-reComputer-r1000-and-AIkit-Hailo-8L
+```
+
+### Copy your model to the raspberry pi5:
+
+make a directory named ```hailomodel```
+```
+mkdir hailomodel
+```
+
+:::note
+The command below you should run on your host computer, not your raspberry pi5, and make sure your host computer and raspberry pi5 at the same net.
+:::
+
+```
+scp -r ./yolomodel/runs/detect/retrain_yolov8n/weights/yolov8n.hef name@:ip /home/pi/Benchmarking-YOLOv8-on-Raspberry-PI-reComputer-r1000-and-AIkit-Hailo-8L/hailomodel/
+```
+
+### Change code
+
+Find line 105 and 106 in ```object-detection-hailo.py```, and change the code like below:
+```
+ elif args.network == "yolov8n":
+ self.hef_path = os.path.join(self.current_path, './hailomodel/yolov8n.hef')
+```
+
+Find line 172 in ```object-detection-hailo.py```, and change the code like below:
+```
+ parser.add_argument("--network", default="yolov8n", choices=['yolov6n', 'yolov8s', 'yolox_s_leaky'], help="Which Network to use, defult is yolov6n")
+```
+
+### Run the code:
+
+```
+bash run.sh object-detection-hailo
+```
+
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
\ No newline at end of file
diff --git a/sidebars.js b/sidebars.js
index 12aa590ab605..e9de6843a44f 100644
--- a/sidebars.js
+++ b/sidebars.js
@@ -3049,7 +3049,8 @@ const sidebars = {
'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/benchmark_on_rpi5_and_cm4_running_yolov8s_with_rpi_ai_kit',
'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/install_m.2_coral_to_rpi5',
'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/convert_model_to_edge_tpu_tflite_format_for_google_coral',
- 'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/pose_based_light_control_with_nodered_and_rpi_with_aikit'
+ 'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/pose_based_light_control_with_nodered_and_rpi_with_aikit',
+ 'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection'
],
},
From 3a4801ff6bb7dd3840887556a160c727436864e9 Mon Sep 17 00:00:00 2001
From: jiahao
Date: Thu, 8 Aug 2024 09:22:36 +0800
Subject: [PATCH 20/23]
update:/home/jiahao/wiki-documents/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit
_with_raspberrypi5_about_yolov8n_object_detection.md
---
...ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md | 3 +--
1 file changed, 1 insertion(+), 2 deletions(-)
diff --git a/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md b/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md
index f10ccbe0268b..c36c0d880ba2 100644
--- a/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md
+++ b/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md
@@ -7,7 +7,7 @@ keywords:
- Ai kit
- YOLO
image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
-slug: /tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection
+slug: /tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection
last_update:
date: 08/6/2024
author: Jiahao
@@ -304,7 +304,6 @@ bash run.sh object-detection-hailo
```
-
## Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
From 2f524d7002eb1a7e43e7ea1dd6dbf6b729d71c2e Mon Sep 17 00:00:00 2001
From: jiahao
Date: Thu, 8 Aug 2024 09:24:23 +0800
Subject: [PATCH 21/23]
update:/home/jiahao/wiki-documents/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit
_with_raspberrypi5_about_yolov8n_object_detection.md
---
...of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md} | 0
1 file changed, 0 insertions(+), 0 deletions(-)
rename docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/{tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md => tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md} (100%)
diff --git a/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md b/docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md
similarity index 100%
rename from docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection.md
rename to docs/Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection.md
From 1dbcc7790192395fbd20091746967a02756518b0 Mon Sep 17 00:00:00 2001
From: jiahao
Date: Thu, 8 Aug 2024 09:32:29 +0800
Subject: [PATCH 22/23] update: sidebars
---
sidebars.js | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/sidebars.js b/sidebars.js
index 91a292642dd1..4be4f1d53315 100644
--- a/sidebars.js
+++ b/sidebars.js
@@ -3050,7 +3050,7 @@ const sidebars = {
'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/install_m.2_coral_to_rpi5',
'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/convert_model_to_edge_tpu_tflite_format_for_google_coral',
'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/pose_based_light_control_with_nodered_and_rpi_with_aikit',
- 'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit _with_raspberrypi5_about_yolov8n_object_detection'
+ 'Edge/Raspberry_Pi_Devices/reComputer_R1000/Applications/Computer-Vision/tutorial_of_ai_kit_with_raspberrypi5_about_yolov8n_object_detection'
],
},
From fc0f0a242994a06f62905c769b7969e9ce9679c0 Mon Sep 17 00:00:00 2001
From: cure123123 <72863081+cure123123@users.noreply.github.com>
Date: Thu, 8 Aug 2024 09:34:18 +0800
Subject: [PATCH 23/23] update
---
.../SeeedStudio_XIAO_ESP32C3/XIAO_ESP32C3_Getting_Started.md | 2 +-
.../SeeedStudio_XIAO_nRF52840-Sense/XIAO_BLE.md | 2 +-
2 files changed, 2 insertions(+), 2 deletions(-)
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C3/XIAO_ESP32C3_Getting_Started.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C3/XIAO_ESP32C3_Getting_Started.md
index 2c46673f76a1..491757f61f00 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C3/XIAO_ESP32C3_Getting_Started.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C3/XIAO_ESP32C3_Getting_Started.md
@@ -39,7 +39,7 @@ This wiki will show you how you can quickly get started with XIAO ESP32C3!
## Specifications comparison
-| Item | Seeed Studio XIAO ESP32C3 | Seeeduino XIAO | Seeed XIAO RP2040 | Seeed XIAO BLE | Seeed XIAO BLE Sense |
+| Item | Seeed Studio XIAO ESP32C3 | Seeeduino XIAO | Seeed XIAO RP2040 | Seeed XIAO nRF52840 | Seeed XIAO nRF52840 Sense |
|-----------------------|--------------------------------|------------------------|-------------------------------------|----------------------------------------|-----------------------------------------|
| Processor | ESP32-C3 32-bit RISC-V @160MHz | SAMD21 M0+@48MHz | RP2040 Dual-core M0+@133Mhz | nRF52840 M4F@64MHz | nRF52840 M4F@64MHz |
| Wireless Connectivity | WiFi and Bluetooth 5 (LE) | N/A | N/A | Bluetooth 5.0/BLE/NFC | Bluetooth 5.0/BLE/NFC |
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/XIAO_BLE.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/XIAO_BLE.md
index e7b437bf4ccb..c4b8867176ae 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/XIAO_BLE.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/XIAO_BLE.md
@@ -56,7 +56,7 @@ Seeed Studio XIAO nRF52840 Sense is compatible to the Seeed Studio XIAO expansio
| Onboard Buttons | N/A | Reset/ Boot Button | Reset Button | Reset Button |
| Onboard LEDs | N/A | Full-color RGB/ 3-in-one LED | 3-in-one LED/ Charge LED | 3-in-one LED/ Charge LED |
| Battery Charge Chip | N/A | N/A | BQ25101 | BQ25101 |
-| Programming Languages | Arduino/ CircuitPython | Arduino/ MicroPython/ CircuitPython | Arduino/ MicroPython/ CircuitPython | Arduino/ MicroPython/ CircuitPython |
+| Programming Languages | Arduino/ MicroPython/ CircuitPython | Arduino/ MicroPython/ CircuitPython | Arduino/ MicroPython/ CircuitPython | Arduino/ MicroPython/ CircuitPython |
## Hardware overview



 +
+ +
+ +
+






 +
+ +
+  +
+  +
+  +
+  +
+  +
+  +
+  +
+