The paddlepaddle version of D4LCN(CVPR2020) https://github.com/dingmyu/D4LCN BAIDU AISTUDIO 项目链接 https://aistudio.baidu.com/aistudio/projectdetail/1420778
https://arxiv.org/pdf/1912.04799v1
https://github.com/dingmyu/D4LCN
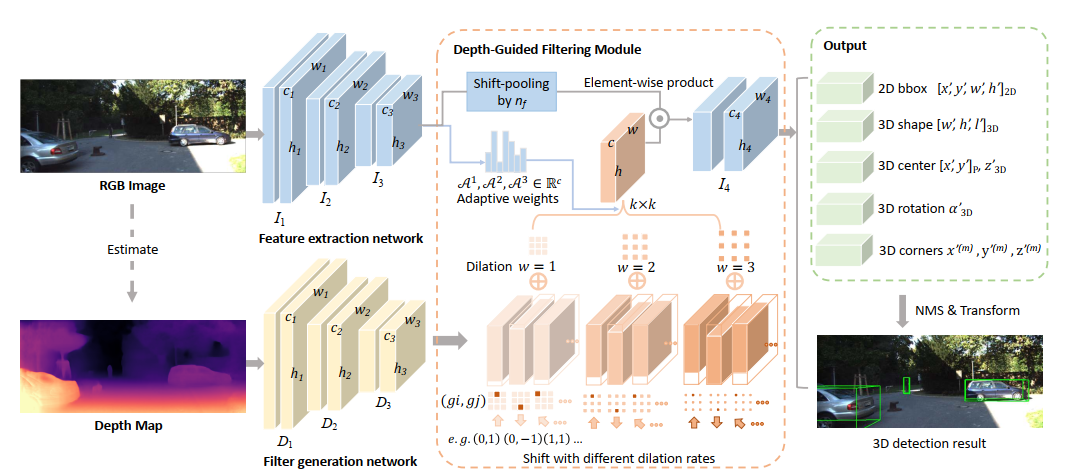
单目3D目标检测最大的挑战在于没法得到精确的深度信息,传统的二维卷积算法不适合这项任务,因为它不能捕获局部目标及其尺度信息,而这对三维目标检测至关重要。为了更好地表示三维结构,现有技术通常将二维图像估计的深度图转换为伪激光雷达表示,然后应用现有3D点云的物体检测算法。因此他们的结果在很大程度上取决于估计深度图的精度,从而导致性能不佳。在本文中,作者通过提出一种新的称为深度引导的局部卷积网络(LCN),更改了二维全卷积Dynamic-Depthwise-Dilated LCN ,其中的filter及其感受野可以从基于图像的深度图中自动学习,使不同图像的不同像素具有不同的filter。D4LCN克服了传统二维卷积的局限性,缩小了图像表示与三维点云表示的差距。D4LCN相对于最先进的KITTI的相对改进是9.1%,单目3D检测的SOTA方法。
先回顾下之前百度论文复现营老师指导的复现流程
- 数据集获取
- 数据预处理
- 构建前向网络
- 构建反向传播
- 精度对齐,小数据集训练两轮
- 去除随机性:本项目中没有dropout项,只需对数据预处理中mirror的随机性置0
- 数据对齐,输入数据:本项目数据预处理部分涉及深度图,需要对其进行预处理
- 模型参数对齐 pytorch 和 paddle 网络参数输出并手动对齐 pytorch参数转化为paddle 将保存的模型载入并设置paddle模型初始化
- loss对齐
- 小规模实验
- 数据集采用kitti 数据集
- dataloader 因paddlepaddle官方给的dataloader方式,无法载入字典easydict类型的文件(原代码需要,保存相机参数等),固参考之前论文复现营的方法,自己定义了dataloader类,详细可见我的博客paddle复现pytorch踩坑(十):dataloader读取
这一步是项目的核心,主要分成两个部分:
- 前向传播
主要分为ResNet、ResNet、DeformConv2d、RPN这几个主要的网络,复习基本流程是这样:
- 每个子网络单独复现
- 先定义一个适合网络输入的全1的矩阵
- 根据paddleAPI对照表依据forward顺序逐一修改
- 打开pytorch文件,同步debug
- 最后RPN的复现,需要同时设置train模型或eval模型,用于矫正
- 反向传播
反向传播过程复现类似,但需要在前向传播复现好的基础上,保存上一阶段跑的结果,输入反向层进行调试。 其中复现遇到的主要问题在损失函数的使用,具体在smooth_l1的用法不一致,输出的维度不同paddle复现pytorch踩坑(八):smooth_l1的用法
做完前面的两个步骤,就完成任务的一半了,没错前面只是一半的工作量,后面才是重点
- 初步对齐:将全1矩阵输入网络前向传播反向传播后对比精度 这里遇到的问题主要是损失函数:pytorch中F.cross_entropy应使用 paddle中的fluid.layers.softmax_with_cross_entropy,其中有很多干扰的API,在复现过程维度上相同的,但精度就相去甚远,相关的分析在我的博客中有详细说明paddle复现pytorch踩坑(七):softmax_with_cross_entropy的用法
- 进阶对齐:将原网络预训练模型输入并预测,对比预测结果 首先需要对pytorch模型进行转化,这一步比较简单,社区内的方法较多,可参考我的博客paddle复现pytorch踩坑(十一):转换pytorch预训练模型 最后输入paddle模型加载pdparams文件成功并对比预测结果相同,则过关。
- 高级对齐:设置相同的config,训练两轮对比结果,如果对比的训练结果相差不远的话,就可以跑实验了。
复现过程中的其他问题,可以参考我的博客,这个模型比较复杂,能踩过的API坑基本都踩过了
paddle复现pytorch踩坑(五):dygraph的一些用法示例
paddle复现pytorch踩坑(六):多维度index下gather的用法
paddlepaddle == 1.8.4
opnecv-python
easydict
python scripts/train.py
模型结果输出为txt标签文件
unzip data/data68262/D4LCNpretrain.zip -d pretrain/
# 可视化输出预测文件
!python scripts/infer.py
编译KITTI数据集评估工具
- 编译
cd scripts/eval/ && g++ -O3 -DNDEBUG -o evaluate_object evaluate_object.cpp && cd ../..
- 评估
# 评估
python scripts/test.py
# 或者直接调用evaluate_object 可执行文件
./scripts/eval/evaluate_object ./data/training/label_2/ ./pretrain/
3D框可视化可借助代码 kitti_object_vis。 通过设置文件路径即可 Windows10、Linux下亲测有效




这篇项目是利用深度图进行3D目标检测的工作,目前3D目标检测的工作主要借助雷达等传感器上,借助点云方法部署在自动驾驶等领域。而对于消费级的深度传感器,则缺乏有效的推理方案,希望这个复现工作可以帮助开发者在paddle框架基础上开展3D目标检测相关的工作。
-
scripts
- train.py 训练脚本
- reader.py 数据集读取脚本
- infer.py 预测脚本
- test.py 评估脚本:会在train.py文件中调用
- config --> depth_guided_config.py 权重配置文件
- eval 文件夹:kitti官网给的评估cpp文件,需编译为可执行文件
-
models
- resnet.py backbone脚本
- deform_conv_v2.py 膨胀卷积引导的backbone脚本
- resnet_dilate.py 网络主体RPN脚本
-
lib
- cpu_nms.py 目标检测NMS后处理算法脚本
- lr.py 学习率调整脚本
- core.py 核心函数脚本
- util.py 核心工具脚本
- augmentations.py 数据预处理类脚本
- rpn_util.py RPN文件辅助脚本
- loss --> rpn_3d.py 损失函数脚本